
УДК 681.8 681.3
Ю. tH. Барышненков, Б. Г. Белкин, /VI. Г. Гордон
микропрограммируемый
процессор — инструмент
звукорежиссера
Современная профессиональная техника подготовки
звуковых программ на телевидении, в кинематографии,
радиовещании, промышленности грамзаписи требует
применения все более сложных способов обработки зву-
ковых сигналов при сохранении весьма высокого их ка-
чества.
Типичной стала технология многоканальной звукоза-
писи, когда каждый инструмент записывается в отдель-
ном канале, а часто и последовательно во времени. По-
лученная исходная многоканальная фонограмма затем
обрабатывается звукорежиссером на этапе перезаписи.
В результате этого получается монофоническая или сте-
реофоническая фонограмма. Наряду со сложением сиг-
налов отдельных каналов, панорамированием, усилением,
простой регулировкой сш налов нередко возникает не-
обходимость в сложных деформациях их временной,
динамической и спектральной структуры или даже в
синтезе искусственных сигналов. Такие задачи удается
решать только при условии представления звуковых сиг-
налов в цифровой форме и обработки их вычислитель-
ными методами, т. е. с помощью специализированных
ЭВМ.
Звуковые сигналы, с достаточной для большинства со-
временных приложений точностью, можно ограничить
полосой частот 20...20 103 Гц, а диапазон изменения
мгновенных значений — с учетом шума каналов вели-
чиной порядка 80...96 дБ. Для речевых сигналов эти
цифры можно уменьшить в два раза. Телефонное ка-
чество обеспечивается при уменьшении полосы частот в
четыре раза Таким образом, в каждом цифровом кана-
ле необходимо обрабатывать поток данных, создавае-
мых источником со скоростью 10...80К байт/с.
В настоящее время идет процесс формирования пред-
ставлений о структурах , аппаратных и пррграмхмных
средств цифровых процессоров звуковых сигналов
(ЦПЗС), обеспечивающих, при разумных затратах, ре-
шение задач различной вычислительной сложности в
реальном времени. На начальном этапе ЦПЗС строи-
лись с использованием ТТЛ-схем малой и средней сте-
пени интеграции [1]. Появление разрядно-модульных
микропроцессорных секций обеспечило необходимую ба-
зу для построения ЦПЗС реального времени [2]. Неко-
торые структуры, ориентированные на такие типичные
задачи обработки как корреляционный анализ, вычисле-
ние свертки для наиболее распространенного вида зву-
ковых сигналов — речевого, удается реализовать на Од-
нокристальных процессорах сигналов [3]. Однако необ-
ходимость обработки сигналов большего объема, чем
телефонный, сегодня удовлетворяется ассортиментом
узко специализированных цифровых приборов, процес-
соры которых удается разместить на одной или не-
скольких платах. Такие приборы выпускаются как за
рубежом, так и в нашей стране. Это блоки эффектов,
реализующие различные алгоритмы перестановки адре-
сов входной последовательности данных, представляю-
щих звуковой сигнал: линии задержки, управляемые
гребенчатые фильтры, блоки управляемого сдвига фазы
сигнала (фэйзеры) и т. п. Кроме того, к ним от-
носятся устройства, имитирующие хоровое звучание,
устройства транспонирования тональности, однопарамет-
рические системы автоматического регулирования усиле-
ния АРУ: ограничители динамического диапазона зву-
ковых сигналов (лимитеры), устройства адаптивного
сжатия и расширения динамического диапазона (ком-
прессоры, экспандеры). Наконец, это приборы линей-
ной и адаптивной фильтрации сигналов: частотные кор-
ректоры, ревербераторы, адаптивные системы шумопони-
жения, реализующие алгоритмы свертки входной после-
довательности данных с заданной импульсной характе-
ристикой фильтра с постоянными или переменными ко-
эффициентами.
Ограниченная производительность современных ЦПЗС*
позволяет звукорежиссеру применять их лишь на уров-
не встроенных систем [5] с циклическими программами
* Например, для реализации средств обработки звукового
сигнала, имеющихся в современном пульте записи, необходи-
мо быстродействие порядка 109 инсгрукций/с (4J.
и интерфейсом ЭВМ — пользователь в форме прибор-
ной панели с привычными органами управления и ин-
дикации. При работе с такими приборами звукорежис*
сер имеет доступ только к некоторым готовым констан-
там, используемым в программах обработки сигналов.
Таким образом, появляющееся в студиях цифровое
звуковое оборудование обеспечивает новые технические
возможности и пока укладывается в сложившуюся фор-
му процесса приготовления звуковых программ. В то же
время ориентация на создание множества разнородных
приборов усложняет и удорожает их производство и
эксплуатацию, затрудняет сопряжение между собой и с
другими элементами звуковых трактов. Поэтому акту-
альной является задача построения различных прибо-
ров на основе одного унифицированного ЦПЗС с на-
бором модулей расширения.
Рассматриваемый специализируемый процессор (СП)
построен на базе микропроцессорного комплекса БИС
серии К1804. Вопросы, традиционные для построения
микропроцессорных систем, рассматриваются схематич-
но, тогда как особенности микропрограммируемых уст-
ройств реального времени обсуждаются более деталь-
но: выбор структуры и форматов представления дан-
ных, организация ввода-вывода (В/В) и обработки по-
токов данных, образуемых сигналами. Широкое рас-
пространение стереофонии обязывает предусматривать
параллельную обработку и организацию В/В как ми-
нимум двух, а то и пяти сигналов.
Специализируемый процессор. Рациональный выбор
архитектуры процессора, структуры и форматов пред-
ставления данных обычно [6] основывается на результа-
тах анализа алгоритмов. Процессор имеет одношинную
(для данных) архитектуру. Его микропрограммные сред-
ства основаны на представлении данных в байтном
формате. Такая архитектура принята на основе анали-
за объемов операций обработки данных, представляю-
щих звуковой сигнал. Учитывались также операции
анализа данных и обмена для алгоритмов обработки
малых объемов сигнала.
Обрабатываемый звуковой сигнал представлен 16-раз-
рядными числами в формате с плавающей запятой, из
них 4 разряда выделены для представления порядка и
12 — для представления мантиссы в двоичном дополни-
тельном коде. Такое представление сигнала использу-
ется в аналого-цифровом и цифро-аналоговом преобра-
зователях, предназначенных для работы с СП, и яв-
ляется неформальным стандартом для АЦП и ЦАП зву-
ковых сигналов, построенных на базе микросхем цифро-
аналоговых преобразователей с точностью до 12 раз-
рядов. При этом обеспечивается динамический диапазон
90 дБ и отношение сигнал/шум, измеренное на сигнале,
66 дБ. При представлении того же сигнала в логариф-
мическом масштабе достаточная для целей анализа и
управления процессом обработки точность достигается
при работе с 8-разрядными числами в формате с фик-
сированной запятой. Наконец, для формирования уп-
равляющих сигналов, являющихся медленными по срав-
нению с периодом дискретизации звукового сигнала
функциями времени, используются 24-разрядные числа,
представленные в формате с фиксированной запятой.
Процессор представляет собой 8-разрядный быстро-
действующий одноплатный процессор с развитыми сред-
ствами В/В [7]. Как и большинство современных про-
цессоров цифровой обработки сигналов, СП является
микропрограммируемым процессором с разделением по-
токов программ и данных. По методике программирова-
ния он проще многих микропрограммируемых универ-
сальных ЭВМ благодаря использованию горизонтальной
структуры слова микрокоманды с простой организацией
полей, но сложнее машин с последовательной програм-
мой. Для рассмотрения внутренней структуры СП
(рис. 1) удобно разделить его на три части: подсис-
тему микропрограммного управления, подсистему обра-
ботки и совокупность цепей, обеспечивающих внутренние
и внешние связи.
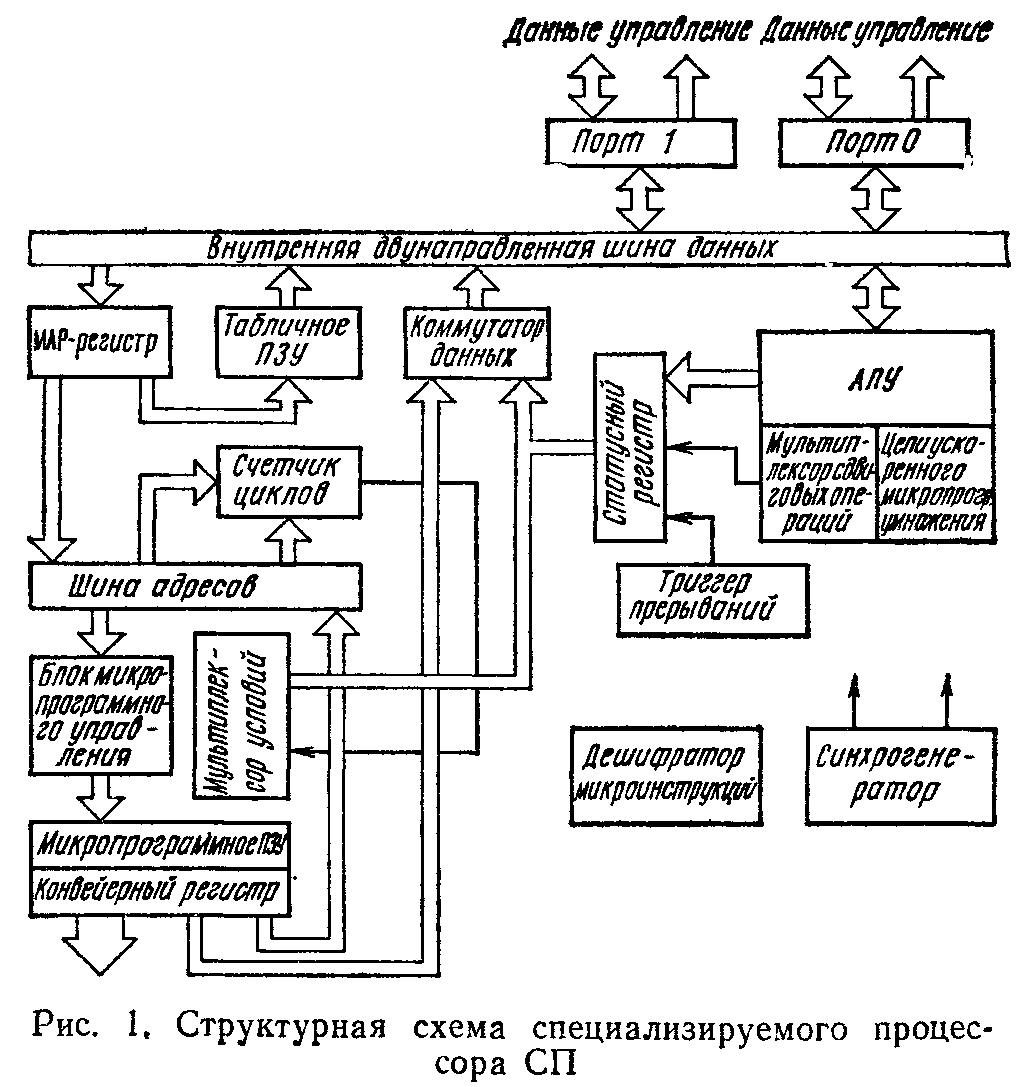
Подсистема управления имеет в своем составе мощ-
ный блок микропрограммного управления, реализован-
ный на микросхемах К1804ВУ2 и К1804ВУЗ, счетчик
циклов, мультиплексор условий с управляемой полярно-
стью передачи, на 7/8 занятый контролем внутренних
признаков АЛУ и вспомогательных цепей. Оставшийся
восьмой вход мультиплексора используется для анализа
триггера флага АЦП. В микропрограммной памяти ока-
залось достаточным использовать 48 разрядов, разби-
тых на функционально ориентированные поля, причем
для достижения наибольшего быстродействия большин-
ство полей (поля микроинструкций и адресов АЛУ, по-
ле микроинструкций БМУ и др.) определены однознач-
но [7]. Сравнительно малая длина слова микрокоманды
получена за счет использования одной внутренней шины
данных, а также введения универсального поля и де-
шифратора микроинструкций. Последнее оказалось
возможным, поскольку для реальных программ обра-
ботки сигналов нет необходимости в одновременном ис-
полнении некоторых сочетаний операций, например опе-
раций обмена данными с внешними устройствами и ус-
коренного микропрограммного умножения. Входящий в
подсистему микропрограммного управления МАР-ре-
гистр используется нетрадиционным образом: во-первых,
как средство управления ветвлением вычислительного
процесса на основе анализа обрабатываемого сигнала
по совокупности признаков и, во-вторых, в качестве ад-
ресного регистра табличного ПЗУ, входящего в состав
подсистемы обработки.
Основным элементом подсистемы обработки являются
две микросхемы АЛУ К1804ВС1, в которых использу-
ется полный набор микроинструкций и адресов. Для ре-
ализации на СП алгоритмов цифровой обработки сиг-
налов в состав подсистемы включены средства, обеспе-
чивающие выполнение последовательных сдвиговых
операций, в том числе и над 16-разрядными данными,
формирование признаков условий типа А^В, а также
цепи ускоренного микропрограммного умножения без-
знаковых чисел и чисел со знаком. Для обработки 16-
разрядных данных оказалась удобной двухстраничная
организация табличного ПЗУ. Для одновременного ис-
полнения программ обработки звуковых сигналов и про-
грамм анализа данных в существенно различных вре-
менных масштабах предусмотрена возможность сохра-
нения признаков в статусном регистре и (или) передача
основных признаков АЛУ в регистры АЛУ или МАР-
регистр.
Внешние связи СП осуществляются двумя 8-разряд-
ными портами В/В, обеспечивающими обмен данными в
пределах микроцикла. Возможен межпортовый обмен
при одновременном исполнении в АЛУ регистровых опе-
раций. Длительность микроцикла программируется и
лежит в пределах 200...350 не, в зависимости от типа
микрокоманды. При организации внешних связей преду-
смотрено использование СП в многопроцессорных сис-
темах двух типов. В системах первого типа, ориентиро-
ванных на применение в приборах линейной и адаптив-
ной фильтрации, развитая логика проверки условий СП
позволяет использовать простые сопроцессоры типа ум-
ножителей с накоплением. При этом управление обме-
ном и вычислительным процессом выполняется СП. В си-
стемах второго типа, предназначенных для реализации
многопараметрических алгоритмов, совместная работа
группы СП организуется путем использования много-
портового ЗУ для хранения результатов промежуточных
вычислений и общих для всей группы процессоров мас-
сивов данных. Помимо перечисленных функций схема
управления и синхронизации обеспечивает возможности
детальной диагностики СП в лабораторных условиях и
обнаружения неисправностей простыми средствами в
условиях эксплуатации.
В минимальной конфигурации прибора цифровой об-
работки звуковых сигналов для промежуточного хра-
нения данных, представляющих звуковой сигнал на ин-
тервале до 100 мс, совместно с СП используется мо-
дуль ОЗУ-СП. Он имеет двухстраничную организацию
памяти с объемом страницы 4Кх8 бит и подключается
к любому порту СП. Ввод-вывод аналоговых сигналов
в СП обеспечивается модулем АЦП/ЦАП,
Организация ввода-вывода сигналов в реальном вре-
мени относится к системным функциям приборов циф-
ровой обработки сигналов. Для приборов реального вре-
мени основным требованием к организации В/В явля-
ется сохранение скорости счета по программе обработки,
т. е. минимизация затрат времени на согласование син-
хронных процессов аналого-цифрового и цифро-анало-
гового преобразований с асинхронными процессами об-
работки сигналов. Определенное распространение полу-
чили традиционные структуры обслуживания В/В, ос-
нованные на прерывании программы обработки. Такое
решение реализовано в процессоре сигналов [8], пред-
назначенном для использования в многопроцессорной
системе. Возможная организация аппаратных средств
для высокоскоростного обслуживания векторного пре-
рывания на микроуровне приведена в работе [9], на
микропрограммном уровне — в [10]. Недостатком, огра-
ничивающим использование прерывания для В/В в
системах реального времени, является снижение ско-
рости счета по основной программе.
Выделим основные задачи, возникающие при органи-
зации В/В в системах РВ. Ограничимся рассмотрением
процессов на малых, порядка периода дискретизации,
временах при непрерывной, а не блочной структуре по-
тока данных. Прежде всего, это задача формирования
единого темпа генерации, обработки и передачи дан-
ных, представляющих звуковой сигнал — привязка по-
тока к постоянной частоте дискретизации. На уровне
преобразователей этой задачи может и не быть, по-
скольку АЦП и ЦАП обычно имеют в своем составе
средства синхронизации. В ЦПЗС такая привязка мо-
жет основываться на использовании микропрограмм
обслуживания прерывания или флаговой логики. Сле-
дующая задача заключается в согласовании отдельных
фаз процессов аналого-цифрового и цифро-аналогового
преобразований и вычислительного процесса.
Возможным решением может быть использование
флаговой логики. В этом случае начало исполнения про-
грамм приостанавливается до тех пор, пока флаг АЦП
не будет выставлен, Завершение очередного цикла пре-
образования в АЦП и установка флага инициирует ис-
полнение программы и последующий сброс [2]. К не-
достаткам этой простой схемы следует отнести пониже-
ние быстродействия [11] и необходимость учета време-
ни исполнения всех ветвей микропрограммы для пере-
дачи данных в точно согласованный временной интер-
вал.
В двухканальном модуле АЦП/ЦАП использована
конвейерная структура потока данных и флаговая ло-
гика для привязки к постоянной частоте дискретизации.
Модуль имеет в своем составе аппаратные средства,
обеспечивающие возможность работы процессора с од-
ним или несколькими такими устройствами. Для этого
в модуль введена схема синхронизации, состоящая из
стабилизированного кварцевым резонатором генератора
с периодом импульсов Т0=200 не, генератора управ-
ляющих сигналов на базе счетчика, ПЗУ управляющих
сигналов и выходного регистра. Сформированные схе-
мой сигналы используются для управления работой ос-
новных узлов модуля АЦП/ЦАП.
Построение схемы на базе счетчика и программируе-
мого элемента памяти (ПЗУ или ПЛМ) в качестве ге-
нератора синхросигналов создает возможности для оп-
тимизации характеристик преобразователя. Время пре-
образования в АЦП удалось сократить до 12 мке на
канал за счет формирования последовательности управ-
ляющих сигналов, учитывающей реальные затраты вре-
мени процесса поразрядного уравновешивания. Данная
схема прошла испытания в составе лимитера АЦЛ-М[7].
Эффективность такого решения подтверждается приме-
нением схемы в многопроцессорной цифровой системе
обработки звуковых сигналов [12].
В модуле АЦП/ЦАП предусмотрены два режима ра-
боты схемы синхронизации. Режим ведущего модуля ис-
пользуется при работе с СП одного модуля АЦП/ЦАП
или только в одном из модулей многоканального при-
бора. Схема синхронизации, работающая в режиме ве-
дущего модуля, генерирует два синхронизирующих сиг-
нала с периодами Т0 = 200 не и Is = 25 мкс. В много-
канальном приборе эти сигналы принимаются цепями
схем синхронизации модулей, работающих в ведомом
режиме. Синхросигнал с периодом Ts=25 мкс обеспе-
чивает синхронное начало процессов аналого-цифрового
и цифро-аналогового преобразований во всех модулях
АЦП/ЦАП, а синхросигнал с периодом Т0=200 не обес-
печивает синхронизацию в пределах текущего цикла
преобразования. В составе СП имеется триггер флага
АЦП, устанавливаемый сигналом синхронизации Ts —
= 25 мкс, предусмотрены средства контроля его состоя-
ния и программного сброса. Таким образом обеспечива-
ется возможность приема данных, формируемых АЦП
строго периодично, и временное согласование моментов
начала и завершения отдельных фаз вычислительного
процесса. В схеме передачи данных АЦП и ЦАП ис-
пользуются двухслойные конвейерные регистры, рабо-
тающие в режиме двухканального «пинг-понга».
В минимальной конфигурации прибора цифровой об-
работки звуковых сигналов: СП, ОЗУ-СП. АЦП/ЦАП*
реализуются алгоритмы однопараметрических систем
АРУ. Упрощенная структурная схема одной из таких
систем — цифрового лимитера, предназначенного для ог-
раничения динамического диапазона звуковых сигналов,
показана на рис. 2 В канале обработки звукового сиг-
нала включены два блока. Блок задержки обеспечивает
задержку звукового сигнала, поступающего на вход
блока регулирования усиления, на время порядка еди-
ниц миллисекунд относительно сигнала на входе блока
анализа, входящего вместе с блоком вычисления усиле-
ния в канал управления. Введение задержки обеспечи-
вает возможность формирования временной зависимости
коэффициента усиления сигнала с учетом его будущих
* Здесь не учтены входные и выходные фильтры АЦП/ЦАП,
а также органы управления и индикации, соответствующие
специализации прибора.
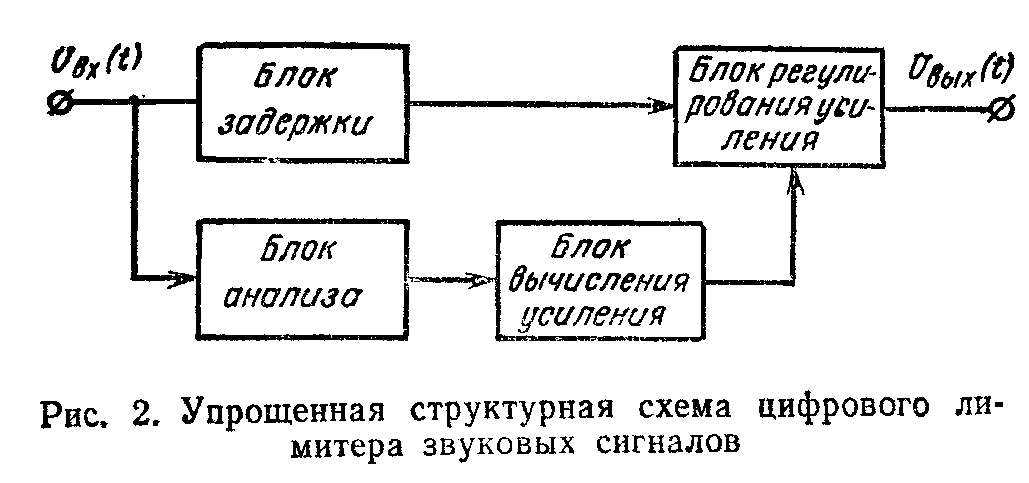
значений (см. Приложение). Вопросы построения ли-
митера и его электроакустические характеристики рас-
Приложение
Алгоритм и подпрограмма задержки звукового сигнала.
Рассмотрим построение алгоритма и подпрограмм задержки
DFLAY звукового сигнала в цифровом лимитере. Перед фикси-
рованной задержкой на время тф, соответствующей блоку за-
держки на рис. 2, здесь дополнительно введена задержка на
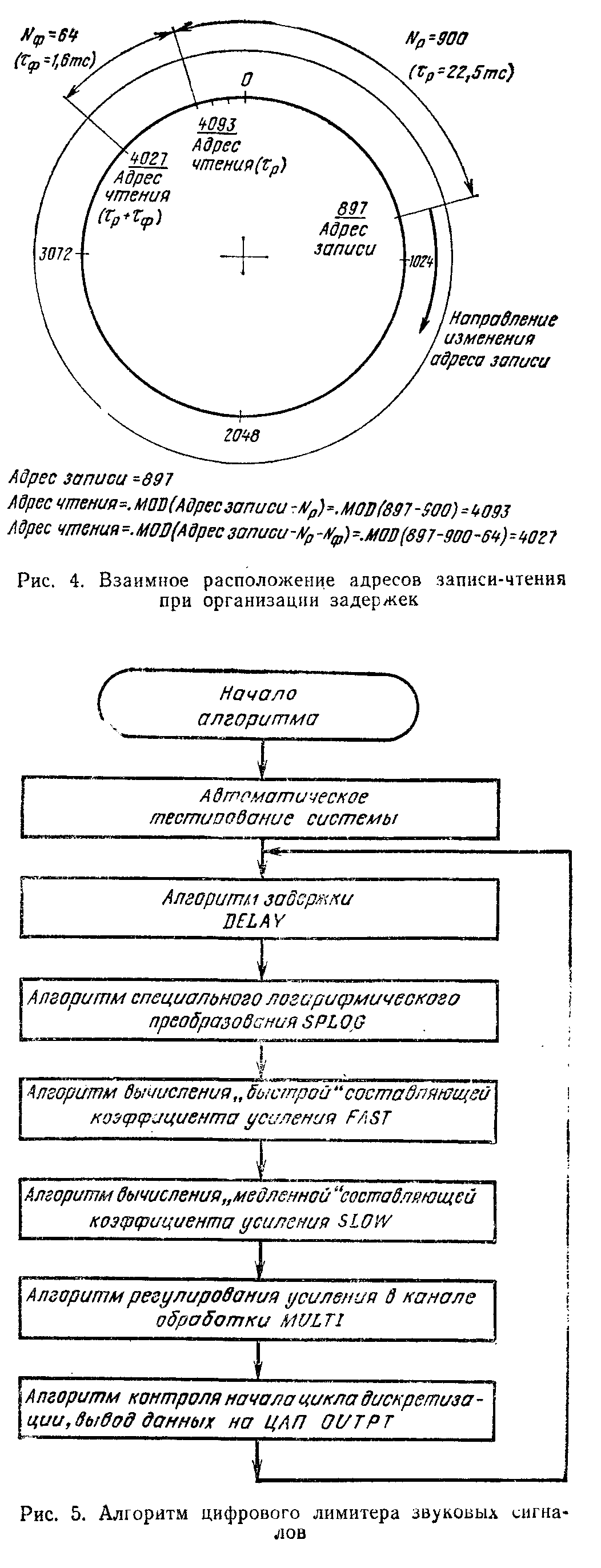
время Тр , устанавливаемое оператором. Примем время за-
держки 1ф . равным 1,6 мс, что соответствует задержке на
N •==64 отсчета сигнала при длительности интервала дискре-
Ф
тизации 25 мкс,. Время задержки тр может изменяться от О
до 100 775 мс при полном использовании объема памяти мо-
дуля ОЗУ-СП (Np «0...4031). Для организации задержки ад-
рес записи входных данных изменяется на +1 на каждом ин-
тервале дискретизации, а разность между адресами записи и
чтения остается постоянной. При этом для памяти данных
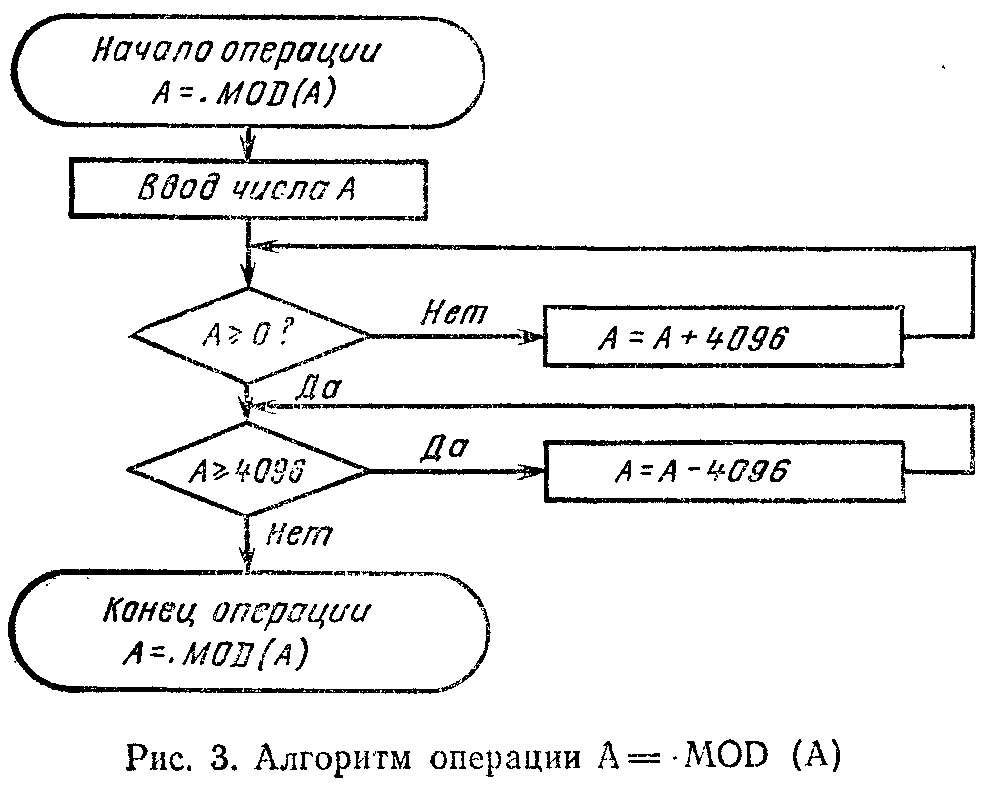
объемом 4096 слов число задержанных отсчетов сигнала равно
N—MOD (АДРЕС ЗАПИСИ — АДРЕС ЧТЕНИЯ),
где символом -MOD обозначена операция вычисления модуля
по основанию 4096. Алгоритм этой операции представлен на
рис. 3. Предполагается, что А — целое. На рис. 4 показано вза-
имное расположение адресов записи чтения для случая тр =
_NpTs = 900 • 0,025=22,5 мс. Адрес чтения данных, задержан-
ных на Np+Мф отсчетов, определяется соотношением
АДРЕС ЧТЕНИЯ--MOD (АДРЕС ЗАПИСИ - Np—Г*ф ).
Очевидно, что для значения Np—4032, соответствующего
-«100,800 мс, адреса записи и чтения совпадают.
смотрены в работе [13]. Не останавливаясь на перечис-
лении операций, необходимых для реализации алгорит-
ма работы лимитера (рис. 5), отметим, что они вклю-
чают в себя все основные типы операций, характерных
для алгоритмов цифровой обработки звуковых сигна-
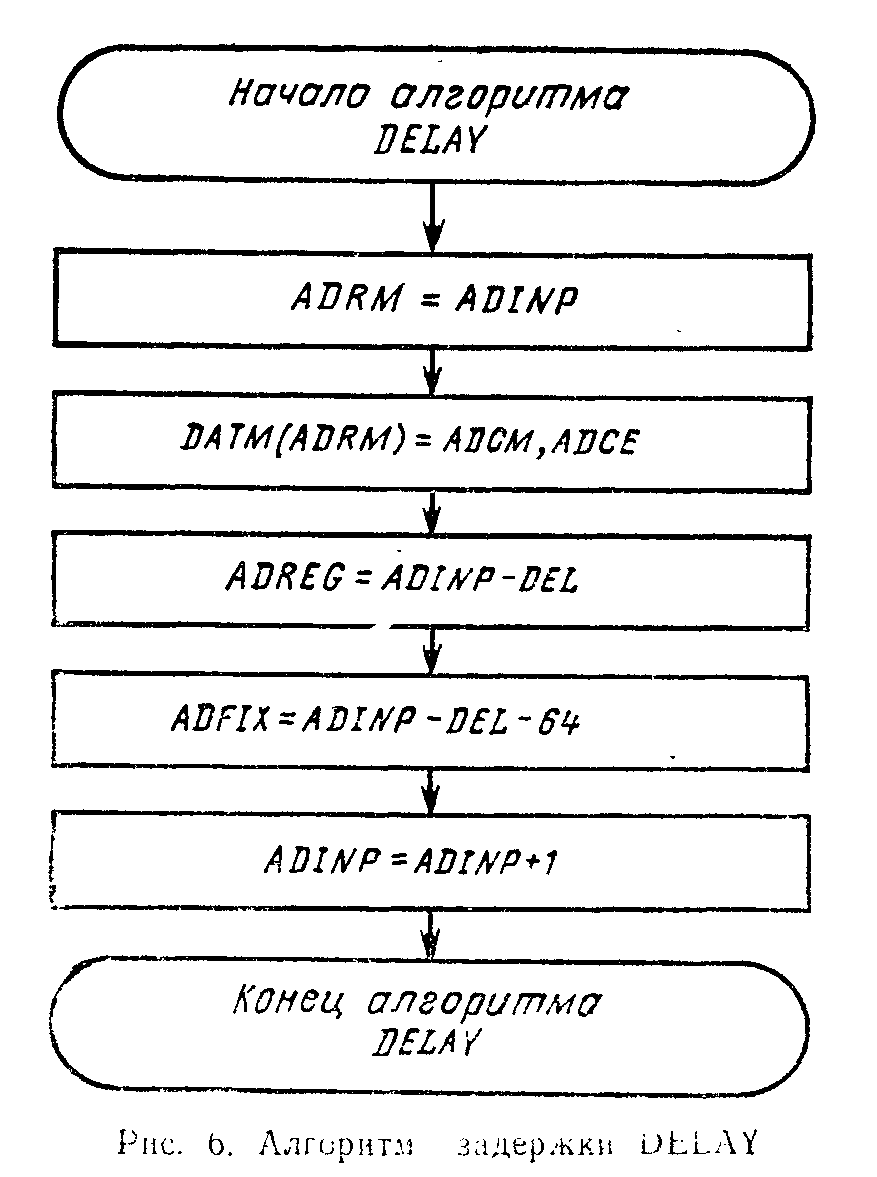
лов. Алгоритм MULTI, основу которого составляет опе-
рация умножения чисел, представленных в формате с
плавающей запятой, и алгоритм задержки DELAY
(рис. 6), рассмотренный подробно в Приложении, непо-
средственно связаны с обработкой данных, представля-
ющих звуковой сигнал. Алгоритмы SPLOG, FAST, SLOW
связаны с анализом данных и управлением процессом
обработки. Для них характерно использование таблич-
ных методов вычислений и большое число условных пе-
реходов. Исполнение рабочей части программы начина-
ется с первой микрокоманды подпрограммы, соответст-
вующей алгоритму DELAY и завершается ожиданием и
контролем момента начала следующего интервала диск-
ретизации по состоянию триггера флага АЦП (под-
программа, соответствующая алгоритму OUTPT). Пос-
ле того как триггер установлен синхросигналом Ts =
=*=25 мкс, генерируемым схемой синхронизации модуля
АЦП/ЦАП, обработанные данные передаются в регистр
ЦАП, триггер сбрасывается и начинается новый цикл
программы. Как и во всех приборах РВ, время испол-
нения наиболее протяженной ветви программы здесь ог-
раничено длительностью интервала дискретизации, рав-
ной 25 мкс. Требуемая скорость вычислений находится
в пределах 3- Ю6...2« 107 операций над байтными операн-
дами в секунду.
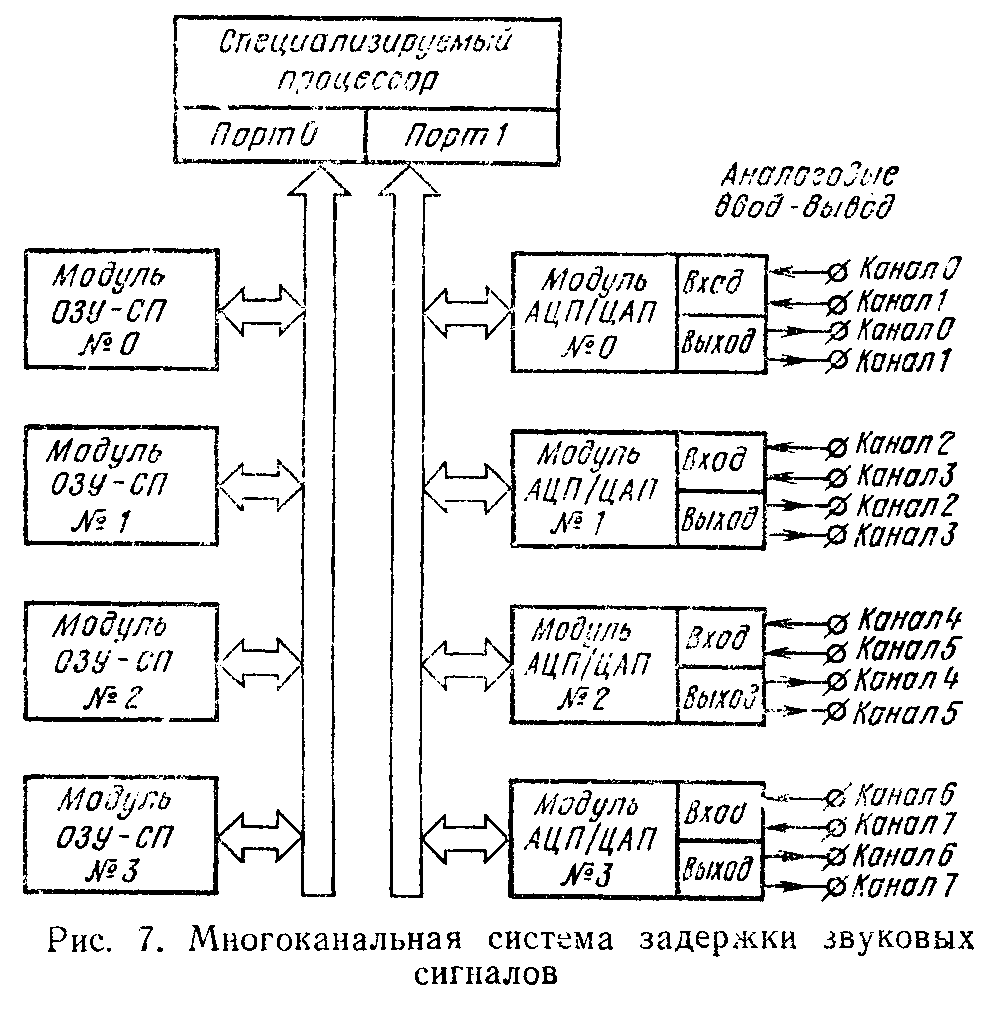
Другим примером прибора ш базе СП, реализующе-
го различные алгоритмы перестановки адресов входных
последовательностей данных, представляющих звуковые
сигналы, является многоканальная система задержки
сигналов (рис. 7). К порту РО СП может быть непо-
средственно подключено до 4-х двухканальных модулей
АЦП/ЦАП, а к порту Р1 — до четырех модулей
ОЗУ-СП При этом образуется 8-канальная система
задержки с суммарным временем задержки около
400 мс, что обычно достаточно для типовых амбиофо-
нических систем [14]. Для реализации программ задерж-
ки системой используется менее 30 % вычислительных
ресурсов СП.
Описанные выше приборы являются примерами одно-
процессорных систем на базе СП. К более сложным
приборам относится адаптивная система шумопонижения
(рис. 8). Такая система представляет собой, по суще-
ству, цифровой фильтр достаточно высокого порядка, па-
раметры которого определяются на основе анализа
входных сигналов. Основы теории адаптивных систем
шумопонижения изложены в работе [15]. Модуль адап-
тивной фильтрации, показанный на схеме, содержит
умножитель с аккумулятором, быстродействующие ОЗУ
данных и коэффициентов, схему микропрограммного уп-
равления и цепи обмена. При выборе избыточной дли-
ны слова данных (24...32 разряда), позволяющей орга-
низовать вычисления без выполнения ряда промежуточ-
ных операций, связанных с проверкой условии, внутрен-
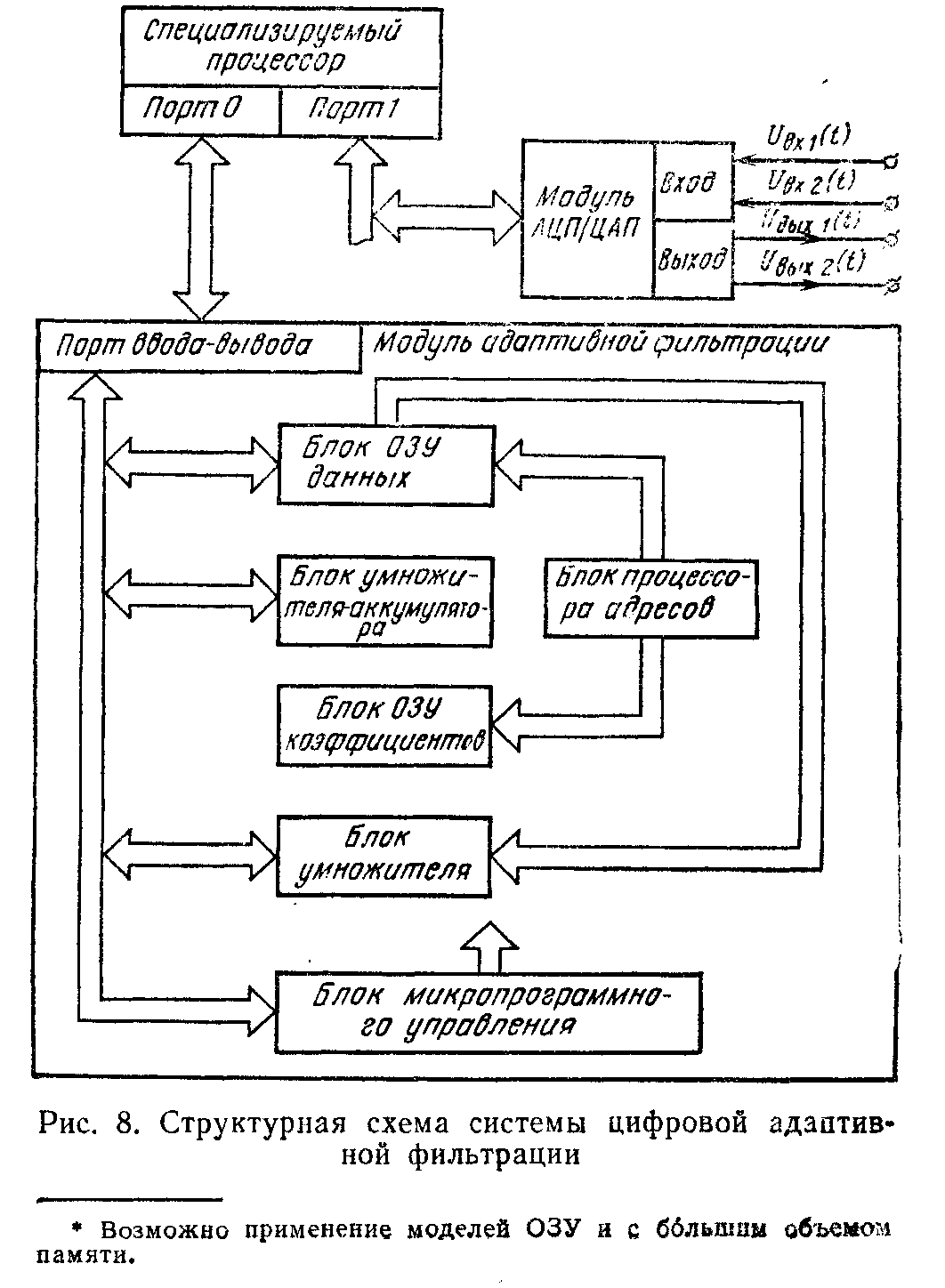
няя структура блока адаптивной фильтрации оказыва-
ется, в силу регулярности рабочей программы, очень
простой.
Приведенные примеры показывают возможности
построения на базе СГ1 и уже описанных модулей при-
боров цифровой обработки звуковых сигналов, реализу-
ющих большинство алгоритмов, используемых в совре-
менной практике обработки звуковых сигналов.
Средства разработки и отладки программ. Для раз-
работки и отладки программ при создании микропро-
граммируемых цифровых звуковых приборов удобно ис-
пользовать настраиваемые кроссистемы [9, 16]. Однако
из-за малого числа команд, реализуемых современными
процессорами в реальном времени, вполне удовлетвори-
тельные условия работы обеспечиваются автономным
комплексом средств разработки и отдладки цифровых
звуковых процессоров [17]. Комплекс позволяет провес-
ти всю совокупность работ, связанных с разработкой
микропрограммируемых цифровых звуковых процессо-
ров: отладку аппаратных средств, разработку и отладку
программного обеспечения и, на завершающем этапе,
программирование микросхем ПЗУ типа КР556РТ5 в со-
ответствии с разработанной микропрограммой. Работа
на комплексе может проходить в двух основных режи-
мах: в режиме программирования и в режиме исполне-
ния микропрограммы. В режиме программирования воз-
можна работа с микропрограммным ОЗУ (МОЗУ)
комплекса, ввод данных, редактирование и модифика-
ция микропрограммы и т п. В режиме исполнения мик-
ропрограммы МОЗУ работает под управлением блока
микропрограммного управления отлаживаемого процес-
сора, эмулируя его микропрограммное ПЗУ, а комплекс
генерирует необходимые сигналы управления и синхро-
низации. В этом режиме могут выполняться такие опе-
рации, как загрузка начального адреса, шаговое испол-
нение микропрограммы, последовательное исполнение,
последовательное исполнение с остановом по заданному
адресу, последовательное циклическое исполнение, оста-
нов исполнения микропрограммы. Предусмотрена также
возможность оперативного контроля дачных на основ-
ных шинах отлаживаемого процессора и его флаговой
логики. Структура комплекса допускает последующее
расширение функций и подключение дополнительных
блоков, имеется своя система команд, предусмотрена
возможность подключения внешней ЭВМ.
Адрес для запроса дополнительной информации:
125167 Москва, Ленинградский проспект, 47. НИКФИ,
Лаборатория электроакустики.
ЛИТЕРАТУРА
1. В 1 е s s е г В. А., В а е d е г К., Z а о г s k i R. A Real-
Time Digital Computer for Simulating Audio Sys-
tems.//Journal of The Audio Frirnneerin^ Societv.—
1975.— V. 23.— No 9.— P. 698-707.
2. S e к i g u с h i Kv I s hi z а к a K-, Matsudai-
r a T. N а к a j i ш a N. A New Approach to High-
Speed Digital Signal Processing Based on Micro-
programming. // Journal of Hie Audio Engineering So-
ciety.—1983.—V. 31.— No 7.—P. 517—522.
3. В u r s к у D. Algorithms and chips cooperate to
squeeze more speech signals into less bandwidth //
Electronic Denign.—1985.—Octobtr 3—P. 90—96.
4. Eastty P. Digital Audio Processing on a Grand
Scale. Presented at the 81 AES Convention.— 1986 —
November, preprint No 2381.
5. Фаулджер P. Программирование встроенных
микропроцессоров.— M.: Мир, 1985.
6. А л л е н Дж. Архитектура ЭВМ для обработки сиг-
налов//ТИИЭР.—1975.—Т. 63.— № 4.—С. 96—107.
7. Барышненков Ю. Н. Специализируемая систе-
ма цифровой обработки Жуковых сигналов//Техни-
ка кино и телевидения.— 1986.— № 1.— С. 16—20.
8. Н е s s о n J. Н., Gallagher F. А., Н а г г i n g-
ton D. R. A 32 Bit Programmable Signal Processor
for a Multiprocessor System Environment // IEEE
Transactions on Acoustics, Speech and Signal Pre-
cessing.—1983.— V. ASSP-31.— No 4.—P. 912—921.
9. Mick J., Brick J. Bit-Slice Microprocessor De-
sign.—N.Y.: McGraw-Hill.—1980.—398 p.
10. White D. E. Bit-Slice Design: Controllers and
ALUs.— N.Y.: Garland STPM Press, 1981.
11. Pa б и нер Л., Гоулд Б. Теория и применение
цифровой обработки сигналов.— М.: Мир, 1978.
12. Мог ley R. Е., Е n g е b г е t s о n А. М., Т г о t-
ta J. G. A Multiprocessor Digital Signal Processing
System for Real-Time Audio Applications // IEEE
Transactions on Acoustics, Speech and Signal Pro-
cessing.—1986.—V. ASSP-34. No 2.—P. 225—231.
13 Гордон M. Г, Барышненков Ю. H. Принци-
пы построения и основные характеристики аналого-
цифрового лимитера // Труды НИКФИ.— 1982.—
Вып. 107.—С. 18—27.
14. Фурдуев В. В. Стереофония и многоканальные
звуковые системы.— М.: Энергия, 1973.
15. Уидроу Б., Гловер Д. Адаптивные компенсато-
ры помех. Принципы построения и применения //
ТИИЭР.—Т. 63.—№ 12.—1975.—С. 69—98.
16. Разработка и отладка микропрограммного
обеспечения цифровых систем на основе секциониро-
вания микропроцессоров. / А Г. Алексенко, А. В. Га-
поненко и др. И Микропроцессорные средства и си-
стемы.—1986.—№ L—С. 37—43.
17. Барышненков Ю. Н., Гречихо С. О. Комп-
лекс средств отладки микропроцессорных систем об-
работки звуковых сигналов в реальном масштабе
времени // Труды НИКФИ.—1982. — Вып. 107. —
С. 28—35.
Статья поступила 31 октября 1986 г.
УДК 681.8 -681.3