УДК 681.325.5—681.326:007.52
В настоящее время прогресс шага-
ющих машин зависит от определе-
ния требований к заказным микро-
процессорным средствам систем уп-
равления.
МИКРОПРОЦЕССОРЫ В РОБОТОТЕХНИКЕ
УДК 681.325.5—681.326:007.52
А. К. Платонов
шагающие машины —
единство механики и микроэлектроники
В настоящее время прогресс шага-
ющих машин зависит от определе-
ния требований к заказным микро-
процессорным средствам систем уп-
равления.
Наиболее древний способ передви-
жения — шагами — техникой не ос-
воен до сих пор. Это тем более
странно, что он обеспечивает самую
высокую проходимость, так как не
требует прокладки на местности не-
прерывной колеи, — достаточно лишь
мест опоры для постановки ног.
Одна из причин отсутствия шагаю-
щих механизмов — низкая скорость
шагания, в то время как история
техники передвижения — это история
борьбы за скорость, когда в основ-
ном совершенствовали или выбирали
дороги, а не движитель. Принцип гу-
сеничного движителя не противоре-
чит этому утверждению, так как гу-
сеницы — это скорее возимая с со-
бой дорога, чем средство приспособ-
ления к преодолеваемой местности.
Но главная причина — нет средств
управления шагающим движением.
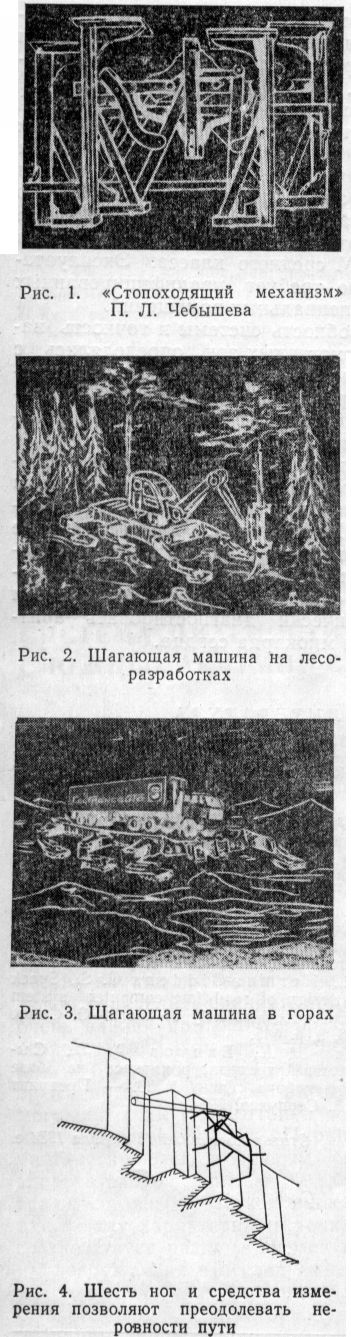
Первые попытки создать шагающий
движитель основывались на механи-
ческих средствах формирования дви-
жения ноги. «Стопоходящий меха-
низм» П. Л. Чебышева —- первый
(1868 г.) построенный на научной
основе шагающий движитель (рис.1).
Его четыре плоских шарнирных ме-
ханизма, приводимых в действие
одним двигателем, обеспечивали пря-
молинейное движение ног и их пере-
нос по кривой _ линии, напоминающей
траекторию стопы человека. Такие
шарнирные механизмы получили на-
звание «лямбдообразные».
Механические средства для форми-
рования движения ноги были разви-
ты известным советским ученым —
создателем теории механизмов и ма-
шин академиком И. И. Артоболев-
ским и его учениками. Их хитроум-
сложную траекторию конца ноги в
разных фазах шага к вращению од-
ного или нескольких двигателей, свя-
занных с ногой системой рычагов. В
этих движителях жесткость цикла
управления компенсируется упруги-
ми элементами конструкции. Они на-
дежны, сравнительно просты и при-
годны для передвижения по не- очень
сложной поверхности, когда нежела-
тельно использовать колесный или
гусеничный движитель. Например, по
экологическим соображениям в усло-
виях вечной мерзлоты нельзя коле-
ей разрушать травяной покров. Ша-
гающая машина на лесоразработках
(рис. 2) не требует прокладки дорог
и портит травяной покров лишь в
местах опоры (касания). Ее не оста-
новят препятствия в виде валунов,
косогоров и канав. В горах (рис. 3),
где невозможно движение колесных
или гусеничных средств, шагающая
машина способна перевозить грузы.
Наиболее перспективны» способ
управления движением ног (взамен
жестких конструктивных связей, ог-
раничивающих число степеней свобо-
ды механизма шагания), — подавать
электрические сигналы на приводные
двигатели, установленные непосред-
ственно в шарнирах ног. В этом слу-
чае можно максимально приспосо-
бить движения ног к рельефу мест-
ности (при соответствующем выборе
кинематической схемы ноги и шага-
ющего движителя).
В настоящее время наиболее упот-
ребительна шестиногая кинематика
(рис. 4), предложенная член-коррес-
пондентом АН СССР Д. Е. Охоцим-
ским. Она копирует двигательный ап-
парат насекомых (членистоногих) и
дает простейшую возможность устой-
Шесть ног и средства измерения
рельефа местности позволяют орга-
низовать комфортабельное движение
платформы шагающего движителя
при небольших неровностях и прео-
доление более крупных неровностей.
При движении статическая устойчи-
вость сохраняется. Центр тяжести
машины находится внутри опорного s
контура, образованного соединением
точек опоры ног. При такой устойчи-
вости шесть ног обеспечивают наи-
большие скорость и адаптивность к
неровностям рельефа. Видимо, поэто-
му у всех насекомых (членистоно-
гих) именно шесть ног.
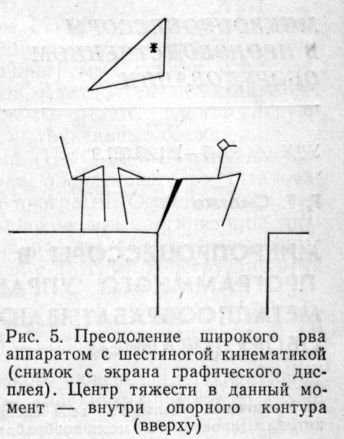
На снимке с экрана графического
дисплея (рис. 5) схематически пока-
зано преодоление шагающей маши-
ной широкого рва. Вверху снимка:
положение центра тяжести (звездоч-
ка) —внутри опорного контура. В дан-
ный момент машина стоит на правых
передней и задней ногах и левой
средней. Ширина постановки ног на
краю рва автоматически уменьшена
с целью наибольшего продвижения
корпуса вперед при дотягивании пе-
редней левой ногой до другого края
' рва.
На рис. 6 изображен макет шагаю-
щего робота с оптическим дальноме-
ром (управляющая ЭВМ—М6000). В
пределах силовых характеристик
приводов и геометрических характе-
ристик ног (размеров звеньев и пре-
дельных углов качания в шарнирах)
макет шагающего робота умеет ав-
томатически поворачиваться на ме-
сте, двигаться боком, вперед или на-
зад и подниматься на небольшие
препятствия и обходить их.
В шестиногом шагающем движи-
теле 18 двигателей. Только при сог-
ласованном выборе законов измене-
ния вращения каждого из них мож-
но преодолеть сложный рельеф мест-
ности [1]. Вместе с тем, очевидно,
что в виде «платы» за подобную гиб-
кость движений ног необходимы
средства формирования сигналов для
управления двигателями привода.
Сигналы в каждый момент времени
должны быть согласованы с позой
шагающей системы, рельефом мест-
ности, скоростью и целью движения.
Проблема формирования таких сиг-
налов применительно к мышечному
аппарату человека получила в оте-
чественной биомеханике название
проблемы построения движений [2].
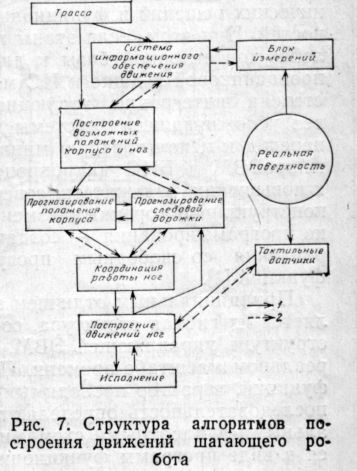
На рис. 7 показана структура ал-
горитмов построения движений ша-
гающего робота (/ — направление
передачи информации, 2 — -управля-
ющий сигнал) [3]. Каждый из бло-
ков може-т быть реализован в одном
или нескольких процессорах. В бло-
ке прогнозирования следовой дорож-
ки содержится максимальный объем
возможных параллельных процессов
вычислений (3003).
Построение движений шагающей
машины немыслимо без вычислитель-
ной техники и прежде всего микро-
электроники, так как важно ограни-
чить габариты и вес автономной
(встраиваемой) системы управления
такой шагающей машины.
Важно отметить, что состав и тре-
буемая архитектура электронных
блоков робота должны определяться
его конструкцией и назначением,
вследствие ограничений реального
масштаба времени и допустимого ха-
рактера параллельной обработки
данных в многоуровневой системе
управления. Например, у системы
управления шагающего робота, ма-
кет которого [4] показан на четвер-
той странице обложки, 5 подсистем,
3 уровня управления и есть потенци-
альная возможность параллельного
протекания более чем 9 млн. процес-
сов весьма простого содержания [3].
Из-за сиецифики этих процессов
(большое число «зацеплений»), как
показало моделирование, использо-
вать архитектуру типа рекламируе-
мой в США ЭВМ Cray, предназна-
ченной для параллельной обработки
данных, малоэффективно. Вместе с
тем, разработка распределенных спе-
циализированных (заказных) микро-
процессорных систем позволяет ре-
шить задачу управления шаганием в
реальном масштабе времени в мень-
шем по сравнению с Cray устройст-
ве управления.
Иными словами, переход от жест-
ких механических связей в кинемати-
ческой схеме ноги к «развязанной»
схеме, дающей максимальную свобо-
ду движения ног, стал возможным
лишь благодаря прогрессу микро-
электроники и, в частности, техники
изготовления заказных микропроцес-
соров и контроллеров.
В свою очередь задача создания
шагающих машин «встречно» опреде-
ляет требования к архитектуре и со-
ставу средств управления. Отличи-
тельная черта перспективных робо-
тов, в том числе шагающих, — сое-
динение в единой системе управляе-
мых и управляющих элементов [3].
В их число входят элементы механи-
ки, двигателей; средства измерения
состояния робота (действующих сил,
положения подвижных частей, их
температуры и т. п.) и характеристик
объектов внешней для робота среды
(геометрии рельефа, положения пре-
пятствий или обрабатываемых с по-
мощью робота деталей и т. п.); сред-
ства вычисления и принятия решений
о требуемом движении приводных
механизмов и, наконец, средства ис-
полнения движений и стабилизации
их при ошибках отдельных двигате-
лей под действием различных возму-
щений. Собрать в единую систему
такие весьма разнородные средства
невозможно без создания специаль-
ных цифровых и аналоговых микро-
электронных приборов, включающих
в себя вычислительные и логические
микропроцессорные элементы, па-
мять, преобразователи, коммутаторы,
силовые ключи, стабилизаторы источ-
ников тока и др. [Б].
ЛИТЕРАТУРА
1. Охоцимский Д. Е„ Пла-
тонов А. К., Кубушев Е. И.,
Павловский В. Е„ Ярошев-
ский В. С. Мини-ЭВМ в контуре
управления шагающим аппаратом. —
В кн.: Динамика управляемых сис-
тем. — Новосибирск: Наука, 1979.
2. Бернштейн Н. А. О постро-
ении движений. — М., 1947.
3. Микропроцессорные системы
управления в робототехнике. — М.:
Наука, 1984. — 176 с.
4. Ефимов В. А., Кудряв-
цев М. В., Титов А. Ф. Физиче-
ское моделирование передвижения
шагающего аппарата. — В кн.: Ис-
следование робототехнических сис-
тем. — М.: Наука, 1982, с. 86—92.
5. Платонов А. К. Проблемы
разработки микропроцессорных
средств для систем управления робо-
тов. — Микропроцессорные средства и
системы, 1984, № 1, с. 23—27.
Статья поступила 4 мая 1984 г.