
Н. А. Блинов, Г. А. Угодников, Г. А. Швецов
микропроцессорные системы управления
ферментацией «автоферм-1» и «автоферм-2»
Автоматизированные системы управления на базе мик-
роЭВМ управляют лабораторными процессами фермен-
тации в реальном масштабе времени.
Снижение стоимости и повышение надеж-
ности микропроцессорных средств способству-
ет их внедрению в управление технологичес-
кими процессами в химии, биологии, медици-
не. Эти факторы обеспечивают в НИР повы-
шение эффективности лабораторных процес-
сов ферментации, комплексный анализ состо-
яния растущих микробных популяций, опти-
мальное управление в реальном масштабе
времени. Супервизорный режим и режим
непосредственного цифрового управления
(НЦУ) -- основные, в которых используются
микроЭВМ автоматизированных систем уп-
равления.
При супервизорном управлении задание
локальному регулятору устанавливается мик-
роЭВМ в соответствии с определяемой алго-
ритмом управления величиной управляющего
воздействия. В качестве примера комплексов
с супервизорным режимом управления мож-
но привести систему управления процессом
культивирования микроорганизмов фирмы
LKB (Швеция) (1] и отечественную систему
«Альфа-60» (2].
В режиме НЦУ микрокомпьютер выполня-
ет все действия по управлению: сбор и обра-
ботку данных, вычисление управляющих воз-
действий. Этот режим используется в систе-
мах управления, выпускаемых фирмами
Taylor (США) [3], Measurex (США) [4] и в
КТС ЛИУС-2 (СССР) [5]. Выбор режима уп-
равления зависит от типа микропроцессорной
системы и необходимости одновременно ис-
пользовать микроЭВМ для других целей.
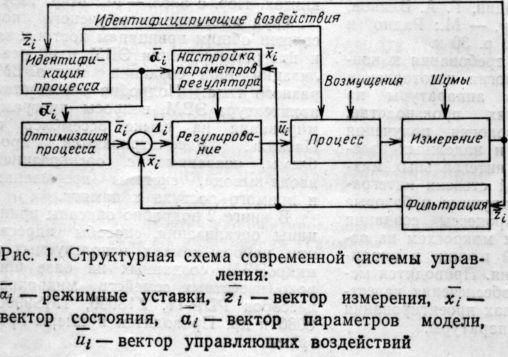
Микропроцессорные системы управления
позволили применить в микробиологическом
эксперименте методы идентификации, оцени-
вания и оптимального управления [6—8]. На
рис. 1 приведена структурная схема совре-
менной системы управления.
Система управления «Автоферм-1»
Система «Автоферм-1» (рис. 2) предназ-
начена для экспериментального управляемо-
го культивирования микроорганизмов. Систе-
ма построена по блочно-модульному принци-
пу. МикроЭВМ «Электроника 60» работает в
режиме супервизорного управления. Фермен-
тационная установка («Фермус-3») имеет
возможность дистанционного задания уставок
для всех регулируемых параметров культу-
ральной жидкости в ферментере: температу-
ры, рН, рОг, оптической плотности, скорости
перемешивания. Модули аналоговых регуля-
торов физико-химических параметров реали-
зуют пропорционально-интегральный закон
управления (ПИ-регуляторы). Для преобра-
зования аналоговых сигналов в цифровую
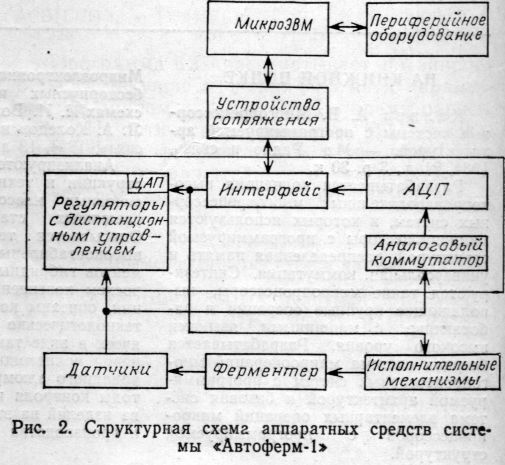

форму и обратно используется аналого-циф-
ровой преобразователь (АЦП) интегрирующе-
го типа с 10-канальным коммутатором и дво-
ично-десятичные цифро-аналоговые преобра-
зователи (ЦАП). МикроЭВМ связана с ниж-
ним уровнем комплекса в дуплексном режиме
через стандартный интерфейс И2.
Программное обеспечение (ПО) системы
«Автоферм-1» (рис. 3) основано на принципе
полной модульности, обеспечивающей про-
граммную независимость модулей системы,
решающих разные подзадачи [8]. Оно позво-
ляет строить математическую модель иссле-
дуемого процесса, оптимально управлять
культивированием микроорганизмов на основе
созданной модели и текущих данных о ходе
эксперимента.
Модули ПО позволяют выполнять следую-
щие функции:
«Предварительная обработка» — иденти-
фицировать канал, ввод, преобразование и
передачу информации в другие модули;
«Управление» — рассчитывать и выводить
управляющие воздействия, выдавать сообще-
ния о воздействиях и управлять по алгорит-
му «Поддержание»;
«Диалог» — прерывать основную програм-
му, идентифицировать запрос, опрашивать
датчики по запросу, фиксировать оперативное
вмешательство в управление и возвращать в
основную программу;
«Модель» — управлять текущим экспери-
ментом по простейшим моделям в реальном
масштабе времени;
«Документ» — документировать ход и ре-
зультаты эксперимента;
«Часы» — вести счет реального времени и
выдавать временные маркеры для других мо-
дулей.
Программа «Диспетчер» — операционная
система ПО текущего эксперимента — связы-
вает модули функционально.
Модули программ разработаны на языках
Бейсик и ассемблер.
Малая автономная система управления
«Автоферм-2»
Система «Автоферм-2» относится к классу
малых автономных систем управления про-
цессом ферментации, реализует режим непо-
средственного цифрового управления и состо-
ит из 6-контурного блока управления, выпол-
ненного на основе микропроцессорного комп-
лекта серии КР580 и блока ферментации
«Фермус-2». Ее можно включить в состав си-
стемы «Автоферм-1», образуя многопроцес-
сорную распределенную систему.
Система «Автоферм-2» предназначена для
автоматического управления периодическим
культивированием микроорганизмов в лабо-
раторных условиях, но благодаря возможнос-
ти программно с передней панели блока уп-
равления изменять характеристики регулято-
ров, пригодна для управления полупромыш-
ленной установкой. Система измеряет рН, еН,
рОг, Т°С, концентрацию О; и СОг в выходном
газовом потоке, оптическую плотность, уро-
вень пены; вычисляет скорости изменения из-
меряемых параметров и выводит все измерен-
ные и вычисленные парамея-ры на 12-знаковый
индикатор.
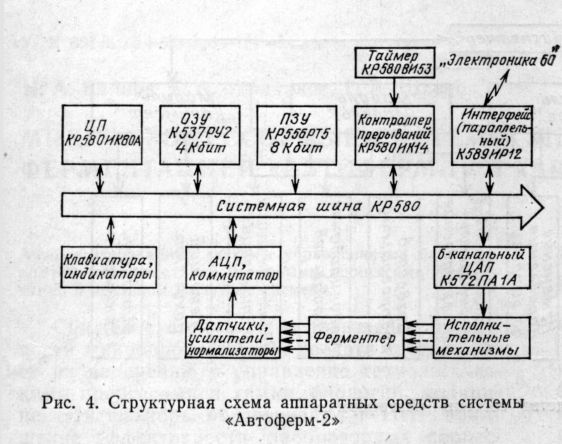
Структурная схема аппаратных средств
системы приведена на pjdc. 4. Аналого-цифро-
вой преобразователь — двухтактного интегри-
рования с цифровой коррекцией дрейфа нуля.
Погрешность измерения его не более 0,1%,
подавление помех общего вида 120 дБ, после-
довательного вида 40 дБ. Гальваническая
развязка системной и измерительной общих
шин выполнена с помощью опто-электронных
преобразователей.
Микропроцессор блока управления выпол-
няет сканирование клавиатуры, идентифика-
цию нажатых на передней панели клавиш и
вызов соответствующих подпрограмм, за-
светку индикаторов, периодическое тестирова-
ние узлов системы, счет реального времени, вы-
числения по алгоритмам «Измерение», «Регу-
лирование», «Управление по модели» (рис. 5).
При выборе алгоритма управления учиты-
валось, что объем памяти системы «Авто-
ферм-2» ограничен (8 Кбайт ПЗУ, 4 Кбайт
ОЗУ), поэтому на модель процесса и алго-
ритм оптимального управления налагаются
следующие ограничения: параметры модели
процесса должны быть прямо связаны с легко
измерямыми и легко вычисляемыми характе-
ристиками процесса; параметры управления
должны вычисляться - по параметрам модели
без итераций; вычисления должны выполнять-
ся в темпе поступления данных.
Анализ методов математической теории
оптимального управления в режиме реального
времени культивированием микроорганизмов
показал (8], что достаточно эффективно мож-
но использовать минимаксные системы (ММ-
системы) (10].
Программы разработаны на языке ассем-
блер. Программы и аппаратные средства сис-
темы «Автоферм-2» отлажены с помощью сис-
темы проектирования в составе системной
ЭВМ класса М6000 с периферийным обору-
дованием, внутрисхемного эмулятора и пер-
фоленточного варианта кросс-ассемблера.

ЛИТЕРАТУРА
1. Цельная система для управления ферментацией
«Электролюкс ЭФИ24». — Информация ЛКБ (прибо-
ры), 1984, № 1, с. 22, 23.
2. Громов Г. Р., Ширшиков Н. В., Литви-
ненко Л. А. Лабораторный аппаратно-программные
комплекс ферментер — ЭВМ «Альфа-60». — Пущино/
НИВЦ АН СССР, 1983. — 20 с.
3. Германе, Ф а р у э л. Контроллер процесса с
адаптируемым усилением. — Электроника, 1978, Т. 51,
№ 24, с. 70—75.
4. Ауслендер Д. М., Такахаси Я., Томид-
з у к а М. Применение микропроцессоров для прямого
управления процессами и алгоритмы для контроллеров ;
на МП. — ТИИЭР, 1978, т. 66, № 2, с. 113—124.
5. М i с h а е 1 R. 1., Н е п г у L. С. Computer control {
of fermentation procesess. — Enzyme and Microbiol. Tech-
nol., 1982, v. 4, N 6, p. 370—380!
7. Рей У. Методы управления технологическими j
процессами/Пер. с англ. — М.: Мир, 1983. — 368 с. 1
8. Блохина И. Н„ Огарков В. И., Угодчи-
к о в Г. А. Управление процессами культивирования '.
микроорганизмов (системный подход). — Горький:
Волго-Вятское кн. изд-во, 1983. — 174 с.
9. Г и т ц е У., Ш е н к К. Полупроводниковая схе-
мотехника /Пер. с нем. — М.: Мир, 1982, с. 480—488.
10. Блинов Н. А., Воронин А. И., Кома-
ров Ю. П., У го дч и ко в Г. А. ММ-системы и их
применение для моделирования динамики биологиче-
ских систем. — В кн.: Динамика биологических попу-
ляций. — Горький: ГГУ, 1973, с. 75—86.
Статья поступила 30 марта 1984 г.
ПЕРВЫЙ ВСЕСОЮЗНЫЙ СЕМИНАР
С 22 по 26 октября 1984 г. в г. Свердловске состо-
ится 1-й Всесоюзный семинар «Промышленная техноло-
гия создания и применения программных средств в ор-
ганизационном управлении и НИОКР».
На семинаре будет обсуждена проблематика и вы-
работаны практические рекомендации по разработке,
производству, поставке и использованию в сфере орга-
низационного управления и НИОКР программных
средств вычислительной техники как продукции произ-
водственно-технического назначения.
Предполагается также обсудить вопросы обеспече-
ния проектной, производственной и эксплуатационной
технологичности программных средств (ПС); структур-
ного анализа ПС и анализа процессов их разработки и
производства; проектирования технологических процес-
сов и нормативов для программистов; проектирования
и изготовления ПС технологического оснащения («ин-
струментальных средств»); отладки и внедрения ком-
плексов программно-технологических средств; организа-
ции и управления технологической подготовкой разра-
боток и производства ПС.
Будут заслушаны проблемные и обзорные доклады
по технологии математического моделирования, по соз-
данию больших программных систем и коллективов
программистов, определению экономической эффектив-
ности, себестоимости и лимитной цены на ПС, техноло-
гии разработки серийных компонентов программного
обеспечения (модулей, пакетов общего назначения, ба-
зовых и прикладных систем) для ЕС ЭВМ, СМ ЭВМ.
БЭСМ, встроенных микроЭВМ, технологии решения
балансовых и оптимизационных задач на основе паке-
тов прикладных программ общего назначения и при-
кладных систем программного обеспечения.
Телефоны для справок: в г. Свердловске 54-25-81,
в г. Москве 246-24-64.