Г. Г. Иордан, В. В. Певзнер
РЕГУЛИРУЮЩИЙ
МИКРОПРОЦЕССОРНЫЙ
КОНТРОЛЛЕР РЕМИКОНТ Р-100
Ремиконт Р-100 создан на основе тщательного изучения
задач автоматического регулирования большого числа
объектов энергетической, металлургической, химической
и других отраслей промышленности. Он заменяет поль-
зователю набор из 64 одновременно работающих при-
боров.
Влияние микропроцессоров
на архитектуру АСУ ТП
Первые опыты применения ЭВМ в АСУ
ТП относятся к 60-м годам. В тот период, как
и десятилетием позже, ЭВМ были громоздки
и дороги, и, чтобы достичь приемлемых техни-
ко-экономических показателей, приходилось
централизовать управление. Управляющие
ЭВМ хотя и работали в режиме реального
времени, но во многом повторяли архитектуру
больших ЭВМ. Время работы центрального
процессора этих машин разделялось между
большим числом разнохарактерных задач уп-
равления; ЭВМ оснащалась внутренней и
внешней памятью большого объема и комп-
лектовалась традиционной для вычислитель-
ной техники периферией. Машина соединялась
с датчиками и исполнительными устройствами
кабельными связями, суммарная протяжен-
ность которых в отдельных случаях достига-
ла нескольких сотен километров. С самого
начала эксплуатации централизованных ком-
пьютерных систем управления выявился их
главный недостаток — низкие надежность и
живучесть. При отказе ЭВМ жизненно важ-
ные центры АСУ ТП оказывались парализо-
ванными, что приводило к большим матери-
альным потерям и угрожало безопасности
производства.
Частично нейтрализовать этот недостаток
пытались двумя способами: резервируя наи-
более ответственные функции машины децент-
рализованными аналоговыми и дискретными
приборами, и используя принцип избыточно-
сти, т. е. дублируя всю машину или отдель-
ные ее компоненты. Каждый вариант заметно
удорожал аппаратное и программное обеспе-
чение, удлинял срок ввода систем в эксплуа-
тацию, увеличивал и без того большую протя-
женность кабельных связей.
Именно поэтому вплоть до последнего вре-
мени у нас в стране и за рубежом ЭВМ оста-
вались в основном принадлежностью инфор-
мационно-вычислительных комплексов АСУ
ТП. Активные функции управления, связан-
ные с непосредственным воздействием на тех-
нологический процесс, выполнялись преиму-
щественно с помощью децентрализованных
аналоговых приборов и дискретных устройств
с жесткой логикой [1].
Тем не менее, идея полной компьютериза-
ции не оставляла разработчиков АСУ ТП. Их
привлекали точность обработки информации
цифровыми методами, вычислительные воз-
можности ЭВМ и, главное, — их высокая гиб-
кость и универсальность, связанная с возмож-
ностью программирования. В конце 70-х годов
микропроцессоры резко улучшили технико-
экономические показатели вычислительной
техники и сделали реальностью широкомас-
штабное применение компьютерных устройств
в АСУ ТП. Достижения в области цифровых
БИС и СБИС настолько изменили облик тех-
нических средств управления, что вызвали к
жизни новую структурную организацию АСУ
ТП — распределенное управление [2].
Особенности распределенного управления
Принципы распределенной АСУ ТП опира-
ются на широкое применение микропроцессор-
ной техники и исходят из трех основных поло-
жений:
— децентрализация функций управления
(позволяет обеспечить необходимую живу-
честь наиболее ответственных подсистем АСУ
ТП);
— централизация функций контроля (опи-
рается на дисплейную технику представления
информации, уменьшает габариты пультов уп-
равления и повышает комфортность работы
оператора);
— цифровые методы передачи и обработки
информации (позволяют сократить протяжен-
ность кабеля, повысить помехозащищенность
линий связи и уменьшить статические и дина-
мические ошибки управления).
В распределенной^АСУ ТП объект управ-
ления разделяется на относительно автоном-
ные зоны или участки, обслуживаемые одним
или несколькими микропроцессорными конт-
роллерами. Микропроцессорные контроллеры
могут быть территориально рассредоточены
по объекту управления и приближены к дат-
чикам и исполнительным устройствам. Эти
контроллеры выполняют функции автоматиче-
ского регулирования, логико-программного
управления, предварительной обработки ин-
формации, технологической защиты.
В связи с тем, что каждый из контролле-
ров обрабатывает сравнительно небольшой
объем информации, при отказе любого конт-
роллера во время его ремонта оператор может
управлять процессом вручную. Поэтому отказ
контроллера не наносит ущерба качеству и
безопасности управления. Несмотря на то,
что контроллеры в распределенной АСУ ТП
могут выполнять совершенно разные функции
и работать в разных подсистемах, они строят-
ся на стандартном наборе унифицированных
модулей и отличаются в основном програм-
мным обеспечением.
Одним из представителей нового класса
технических средств управления, предназна-
ченных для применения в распределенных
АСУ ТП, является регулирующий микропро-
цессорный контроллер Ремиконт Р-100. Он
позволяет решать задачи автоматического ре-
гулирования, однако принципы его построения
характерны и для других контроллеров, обра-
зующих систему распределенного управления.
При разработке Ремиконта Р-100 прини-
мались во внимание указанные выше особен-
ности распределенной АСУ ТП, а также два
дополнительных фактора, присущих системам
автоматического регулирования: массовость
регулирующей аппаратуры и исключительно
высокие требования к ее надежности. Первый
фактор определил архитектуру Ремиконта
Р-100, второй — аппаратно-программные осо-
бенности его построения.
Архитектура
Архитектура Ремиконта Р-100 такова, что
он предстает перед пользователем в виде изде-
лия, настраиваемого и функционирующего
привычным для специалиста по автоматике
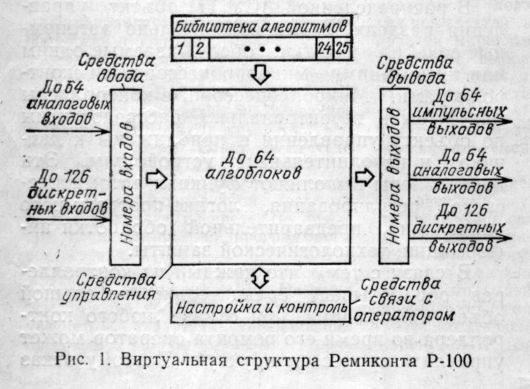
образом. Виртуальная (возможная) структура
Ремиконта Р-100, отражающая потребитель-
ские свойства этого изделия, состоит из следу-
ющих элементов (рис. 1): алгоритмических
блоков (алгоблоков); библиотеки алгоритмов;
средств ввода-вывода информации; средств
связи с оператором.
Алгоблок реализован программно и в
функциональном отношении эквивалентен от-.
дельно взятому аналоговому прибору. Однако
в отличие от аналогового прибора, имеющего
жестко заданные функции, алгоритм, реали-
зуемый алгоблоком, заранее не определен. Ал-
гоблок содержит собственно входы-выходы,
, узел задатчика, узел настройки и блок пере-
ключения режимов управления. Связи алго-
блоков между собой и- с входами-выходами
контроллера назначаются оператором в про-
цессе настройки контроллера непосредствен-
но на объекте управления.
В Ремиконте Р-100 могут быть задейство-
ваны до 64 алгоблоков, работающих незави-
симо друг от друга либо образующих много-
связную систему.
Библиотека алгоритмов управления Реми-
конта Р-100 так же, как алгоблоки, реализо-
вана программно. Ее состав был сформирован
на основе тщательного изучения задач авто-
матического регулирования большого числа
объектов энергетической, металлургической,
химической и других отраслях промышленно-
сти. Библиотека содержит 25 наиболее упот-
ребительных алгоритмов, в том числе алгорит-
мы пропорционально-интегрально-дифферен-
циального (ПИД) регулирования, статических
и динамических преобразований сигналов,
ряда математических и нелинейных операций,
управляющей логики. Каждый алгоритм обра-
зован характерной «связкой» Типовых функ-
ций управления, таких, как масштабирование,
фильтрация, ограничение и т. п. Общее число
функций библиотеки алгоритмов достигает
сорока.
Каждый алгоритм настраивается на реше-
ние конкретной задачи с помощью коэффици-
ентов, наименование которых (например, вре-
мя интегрирования, уровень ограничения и
т. п.) хорошо знакомо наладчикам традицион-
ных систем регулирования.
Любой алгоритм в процессе программиро-
вания можно помещать в любой алгоблок и
использовать многократно.
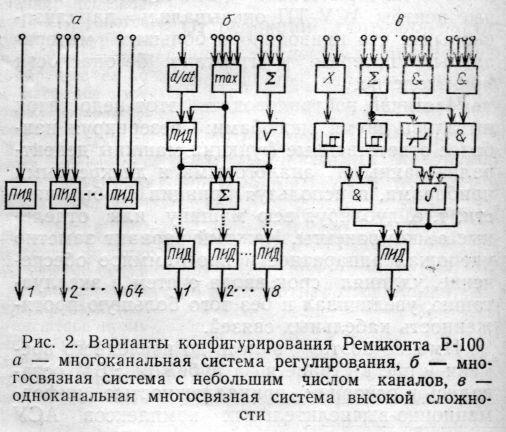
Таким образом, Ремиконт Р-100 предстает
как набор из 64 самостоятельных, одновре-
менно работающих, приборов, «включаемых»
в процессе настройки от нажатия небольшого
числа кнопок, функциональных клавиш, зада-
ющих алгоритмы, систему связей и коэффи-
циенты. Ремиконт Р-100, по желанию потреби-
теля, можно превратить в многоканальный
регулятор, либо в малоканальную, но много-
связную подсистему управления (рис. 2).
Аппаратно-программные, особенности
Аппаратура Ремиконта Р-100 состоит из
микропроцессорного вычислителя, устройств
связи с объектом (УСО) и с оператором.
В целом этот состав достаточно традици-
онен, однако каждая из составных частей ап-
паратного обеспечения Ремиконта Р-100 име-
ет свои особенности, преследующие главную
цель — обеспечить высокую надежность и
минимизировать опасные последствия сбоев и
отказов.
Микропроцессорный вычисли-
тель Ремиконта Р-100 построен на базе ми-
кропроцессора КР580ИК80. Помимо процессо-
ра он содержит также ПЗУ на микросхемах
КР556РТ5 с пережигаемыми перемычками и
ОЗУ на микросхемах КР188РУ2, выполнен-
ные по КМОП технологии. Для сохранения
информации при отключении питания исполь-
зуется резервная батарея. В вычислителе при-
няты особые меры, предотвращающие искаже-
ние информации в ОЗУ во время переходных
процессов при включении и отключении пита-
ния. Специальные аппаратные средства пере-
запуска предотвращают случайные «зацикли-
вания» программы, приводящие к нарушению
заданной периодичности вычислений.
Устройства связи с объектом
обеспечивают сопряжение вычислителя с ана-
логовыми и дискретными датчиками, а также
с аналоговыми, дискретными и импульсными
исполнительными устройствами. УСО гаран-
тирует устойчивую работу Ремиконта Р-100 в
условиях помех высокого уровня. Для подав-
ления помех общего вида УСО содержат ин-
дивидуальную (для каждого входного и вы-
ходного канала) гальваническую развязку..
Импульсные и гармонические помехи нор-
мального вида подавляются аналоговыми
•фильтрами нижних частот и интегрирующим
АЦП.
Ус тройство связи с операто-
ром имеет панель оператора, модуль индика-
ции и модуль сигнализации отказа. Панель
оператора (выносной блок с функциональной
клавиатурой и индикаторами) используется
для настройки Ремиконта Р-100 и оператив-
ного контроля за его работой. Модуль инди-
кации позволяет наблюдать за работой конт-
роллера при отключенной панели оператора.
Модуль сигнализации отказа содержит аппа-
ратные средства самодиагностики, контроли-
рующие вторичные напряжения питания, нор-
мальную цикличность работы контроллера и
сигнал таймера, являющийся датчиком реаль-
ного времени.
Ремиконт Р-100 снабжен бестрансформа-
торным стабилизированным источником пита-
ния импульсного типа, вырабатывающим на-
пряжения ±5, +12 В для питания цифровых
схем и ±15 В для питания операционных уси-
лителей.
Организация программного обеспечения
Ремиконта Р-100 также гарантирует высокую
надежность. Так как контроллер должен дли-
тельное время работать без профилактики,
пришлось отказаться от применения внешней
памяти на магнитной ленте или дисках. Все
программное обеспечение Ремиконта Р-100 —
внутреннее и записывается в ПЗУ на заводе-
изготовителе.
Программное обеспечение контроллера
содержит диспетчер реального времени, про-
граммы алгоритмов управления, программу
обслуживания внешних устройств (УСО, па-
нели оператора), а также подпрограммы ум-
ножения, деления и других арифметических и
логических операций. Кроме того, контроллер
имеет программные средства самодиагности-
ки и тестирования.
Диспетчер реального времени организует
последовательное циклическое выполнение
программ алгоритмов управления. Время цик-
ла — величина переменная и задается опера-
тором при настройке контроллера.
Программы алгоритмов управления фор-
мируют библиотеку из 25 наиболее употреби-
тельных алгоритмов автоматического регули-
рования.
Программы обслуживания внешних уст-
ройств опрашивают регистры аналого- и диск-
ретно-цифровых преобразователей, записыва-
ют управляющую информацию в регистры
цифро-аналоговых, цифро-дискретных и циф-
ро-импульсных преобразователей. Эти же про-
граммы опрашивают функциональную клави-
атуру панели оператора и обслуживают све-
тодиодные и цифровые индикаторы этой пане-
ли.
Подпрограммы арифметических и логиче-
ских операций формируются программными
модулями.
Программы самодиагностики выполняются
в каждом цикле работы контроллера. Встро-
енные тесты помогают локализовать неис-
правность с точностью до платы, а для моду-
лей ПЗУ — с точностью до микросхемы.
Конструктивное исполнение
Ремиконт Р-100 может применяться как
для автоматизации сравнительно небольших
объектов, когда весь объем задач решает один
контроллер, так и в распределенных АСУ ТП,
в которых используется большое число конт-
роллеров. Поэтому Ремиконт Р-100 имеет два
конструктивных исполнения — приборное и
шкафное.
Ремиконт Р-100 в приборном исполнении
размещается в автономном кожухе (рис. 3), а
в шкафном исполнении — в шкафу (в шкафу
помещается до четырех контроллеров).
Конструктивную основу обоих исполнений
составляет блочный каркас с 23 модулями.
Каждый модуль содержит лицевую панель
шириной 20 мм и печатную плату размером
160x235 мм. С помощью двух разъемов мо-
дуль подключается к внутриблочному интер-
фейсу (логически соответствует интерфейсу
И-41). Входные и выходные аналоговые и дис-
кретные цепи подключаются к модулю через
разъемы, установленные на лицевой панели
модуля. Для повышения надежности все разъ-
емные соединения дублированы.
Из 23 мест блочного каркаса 9 отводится
под модули, входящие в базовый комплект,
т. е. модули микропроцессорного вычислителя,
индикации и сигнализации отказа. Остальные
14 мест распределяются между модулями
УСО в процессе проектной компоновки конт-
роллера.
Ремиконт Р-100 комплектуется блоком ста-
билизированного питания, панелью оператора
и резервной батареей. Кроме того, по специ-
альному заказу в комплект включаются не-
стабилизированные источники напряжения

24 В для питания входных и выходных диск-
ретных и импульсных цепей, а также блок пе-
реключения резерва (применяется в схемах
дублирования контроллеров).
Основные технические характеристики
Число входов:
аналоговых..... . до 64
дискретных ....... до 126
импульсных . . .... до 64
аналоговых . . ... до 64
дискретных.......до 126
входные и выходные аналоговые сиг-
налы ........0—5,
0-20,4—
20 мА;
0—10 В
входные дискретные сигналы:
логический 0 (любой знак), . . 0—3 В
логическая 1 (любой знак) . . 18—30 В
выходные дискретные и импульсные
сигналы (состояние контактов):
логический 0......разомкну-
тое
логическая 1......замкнутое
коммутирующая способность выход-
ных контактов ......48 В; 0,1 А
число алгоблоков.....до 64
число алгоритмов управления . . 25
время цикла ..... . . 0,27— 2,04 с
точность установки сигнала задания 0,1%
статистическая погрешность стабили-
зации паарметра (без учета по-
грешности датчика) .... 0,2%
время, в течение которого при отклю-
ченном питании сохраняется за-
программированная информация . 94 ч
Ремиконт Р-100 планируется дополнить
портами для подключения к интерфейсам по-
следовательной связи — радиальному ИРПС
и магистральному ИМПС.
Особенности использования
Как уже указывалось, надежность и прос-
тота использования — два важнейших пара-
метра любого «активного» устройства управ-
ления, непосредственно воздействующего на
регулирующие органы и изменяющего пара-
метры технологического процесса.
Принятые в Ремиконте Р-100 меры повы-
шения надежности позволили добиться сред-
него расчетного времени наработки на полный
отказ и на отказ по одному каналу соответ-
ветственно около 5 и 3 тыс. ч. при использова-
нии не прошедших тренировку общепромыш-
ленных микросхем в пластмассовых корпусах.
Применение микросхем в металло-керамиче-
ских корпусах и их предварительная трени-
ровка повышает эти показатели в 3—5 раз.
Когда и эти показатели надежности недоста-
точны, используется дублирование контролле-
ров.
