

УЧЕБНЫЙ ЦЕНТР
удк 681.325.54
Ю. И. Торгов
программируемый таймер
кр580ви53 и его применение
«
0
Программируемый таймер — одна из наиболее уни-
версальных больших интегральных схем (БИС) микро-
процессорного комплекта серии КР580 — расширяет
возможности любой микроЭВМ в решении прикладных
задач и применим для создания видеоконтроллера,
позволяющего использовать телевизор в качестве дис-
плея; системы оптимального регулирования режима ав-
томобильного двигателя, а также различных преобра-
зователей параметр—код и код—параметр.
Программируемый таймер можно исполь-
зовать в следующих стандартных режимах
работы: счетчик событий; программируемый
ждущий мультивибратор; делитель частоты;
генератор меандра, программно- и аппаратно-
запускаемого строба. Число независимых
счетчиков таймера — 3, разрядность каждо-
го— 16, режимы счета — двоичный и двоич-
' ж
но-десятичный.
Хотя БИС таймера спроектирована для
подсоединения к шине микропроцессорного
комплекта серии КР580, она с минимальным
количеством добавочных компонентов может
быть состыкована с другими стандартными
шинами (например, каналом микроЭВМ
«Электроника-60», шинами любого семейства
микроЭВМ).
Ниже будет показано, что, используя БИС
КР580ВИ53, можно значительно расширить
возможности любой микроЭВМ в решении
многих типов прикладных задач.
Функциональное устройство микросхемы
БИС КР580ВИ53 содержит три одинако-
вых таймерных канала. В каждом есть ре-
гистр управления, 16-разрядный программи-
руемый счетчик обратного счета с цепями уп-
равления и двухбайтный буферный регистр,
в который по специальной команде переписы-
вается текущий код счетчика. Счетчик может
быть запрограммирован для двоичного или
двоично-десятичного счета. Соответственно
меняется и диапазон счета (65535 для двоич-
ного и 9999 для двоично-десятичного). После
#
инициализации, т. е. установления БИС в ис-
ходное состояние (подачей кодов на регист-
ры), работой каждого счетчика управляют
два внешних сигнала.
Первый сигнал — синхроимпульсы (Си)
подается на вход, по отрицательному фронту
Си код счетчика уменьшается на единицу.
Второй сигнал подается на вход управле-
ния счетчиком; если сигнал высокого уровня,
счетчик будет работать, если низкого уров-
ня — нет.
Выходной сигнал «Вых.» таймера генери-
руется при достижении терминального кода
на счетчике в режиме счета (в большинстве
режимов работы этот код равен 0). Содержи-
мое старшего и младшего байтов счетчиков
программно доступны процессору. Коды счет-
чика считываются в любой момент стандарт-
ными операциями чтения.
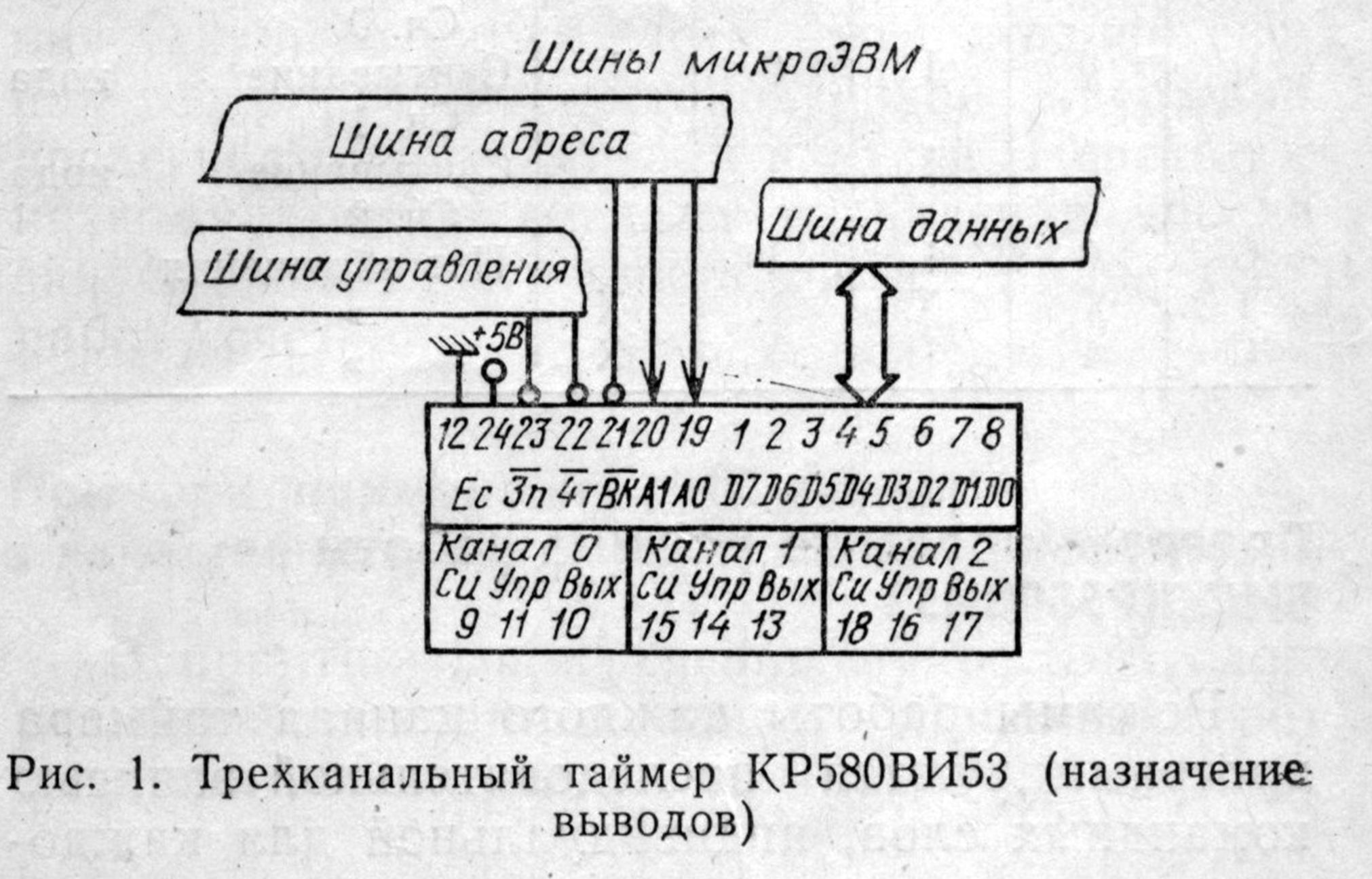
Связь таймера с сигнальной
шиной микроЭЗМ
БИС КР580ВИ53 может быть связана
(рис. 1) с сигнальной шиной любой микро-
ЭВМ через 8-разрядный входной двунаправ-
ленный буфер данных, подключаемый к шине
данных микроЭВМ; через три адресных входа
(ВК, АО и А1) — к шине адреса микроЭВМ
(причем сигнал ВК (выбор кристалла) — че-
рез дешифратор старших разрядов системного
адреса микроЭВМ); через сигналы Чт (чте-
ние) и Зп (запись) — к шине управления мик-
роЭВМ. В зависимости от подключения вхо-
дов Чт и Зп таймера к сигналам MR, MW
или к 1 OR, 10W микроЭВМ, обращение к тай-
меру производится операциями работы с па-
мятью (MOV) или внешним устройст-
вом (INPUT/OUTP) (для микропроцессора
КР580ИК80).
Возможна связь таймера с сигнальными
шинами другого стандарта при соблюдении
временных соотношений протокола обмена,
установленных для комплекта БИС серии
К580. Например, при стыковке таймера с ка-
налом микроЭВМ «Электроника-60» в качест-
ве сигнала ВК используется сигнал ВБ (вы-
бор блока), сигналу «Чт» соответствует сиг-
нал «Ввод», сигналу «Зп» — сигнал «Вывод»,
дизъюнкция сигналов «Чт» и «Зп» исполь-
зуется для формирования сигнала «СИП»
(синхросигнала пассивного устройства).
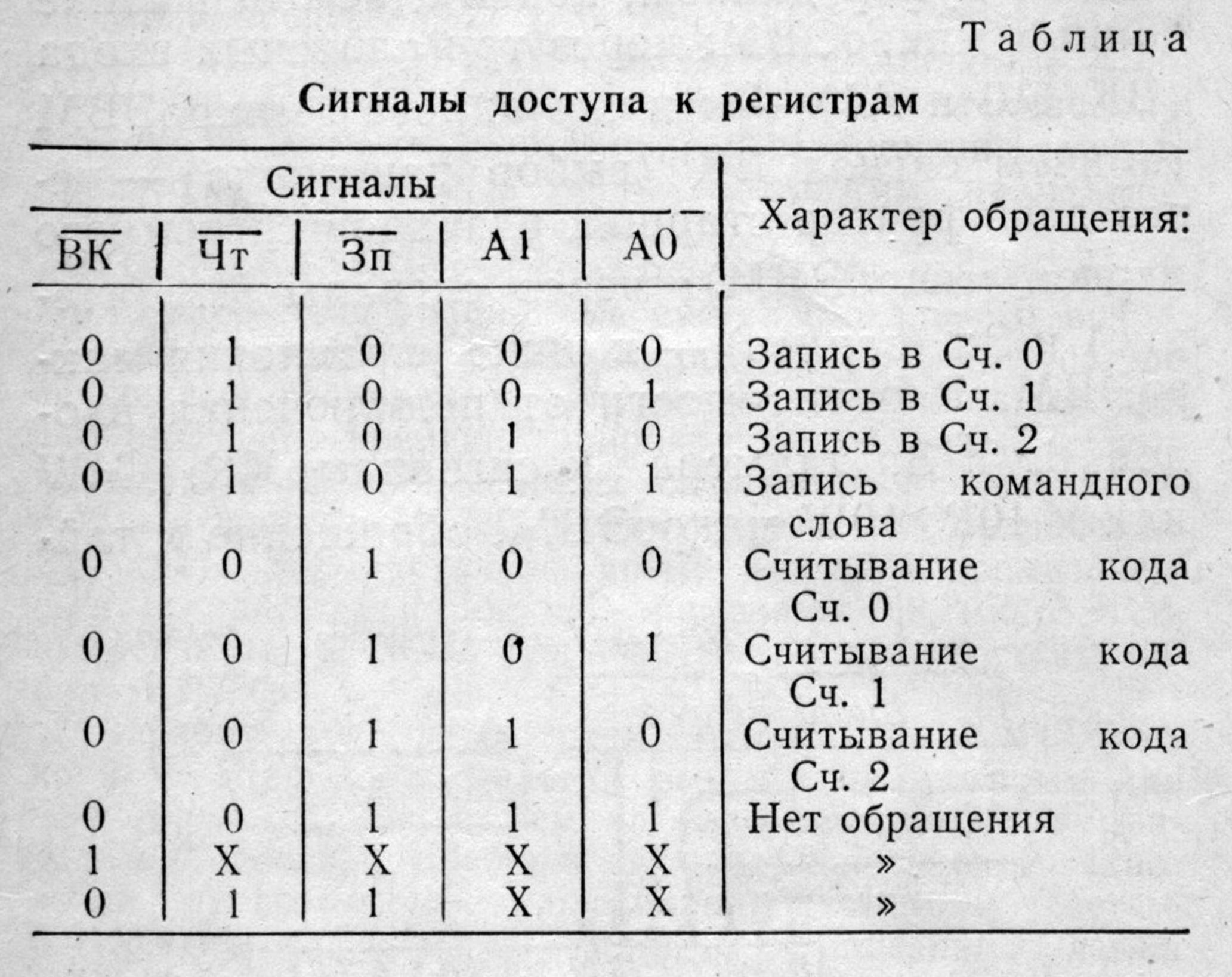
Адреса внутренних регистров
В составе микросхемы—16 индивидуаль-
но адресуемых однобайтных регистров; с
частью из них связь косвенная (с помощью
разрядов адресации командного слова).
Прямая адресация обеспечивает доступ к
общему для трех каналов регистру командно-
го слова (только при операции записи) и к
счетчикам.
Считывание регистра командного слова
запрещено. Содержимое регистров счетчиков
может быть считано или новый код может
быть в них записан соответствующими опера-
циями чтения и записи. В таблице приведены
комбинации сигналов обращения к регистрам.
Программирование режима работы
БИС КР580ВИ53
Режимы работы каждого канала таймера
программируются последовательной записью
командных слов, индивидуальной для каждо-
%
го канала, в адрес общего для трех каналов
командного регистра (А0=1, А1 = 1). Затем
записывается нужный код пересчета в адрес
счетчика инициируемого канала, после чего
соответствующий канал БИС готов к работе
под управлением внешних сигналов.
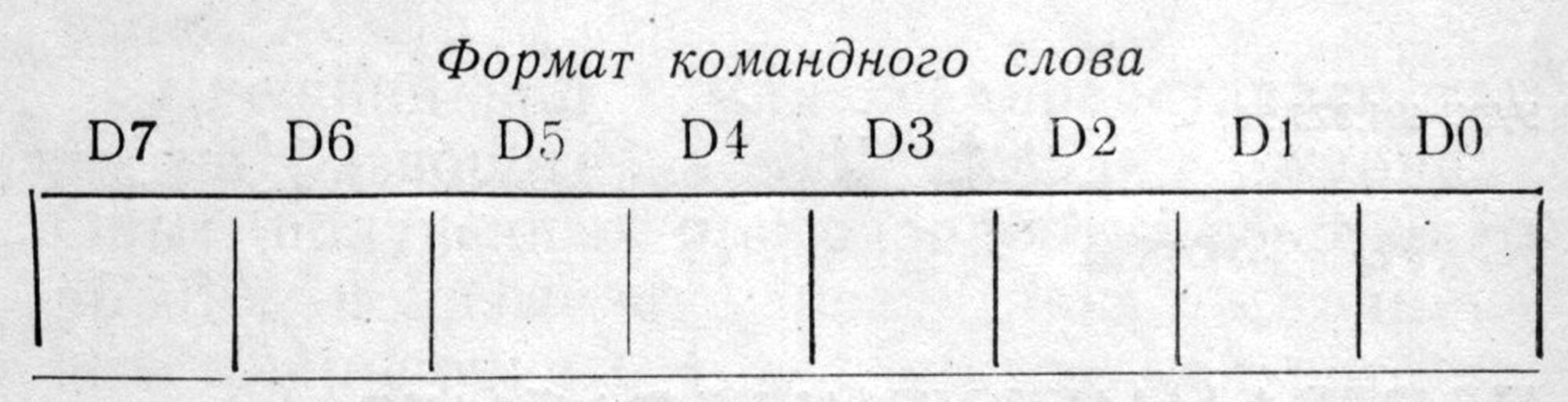
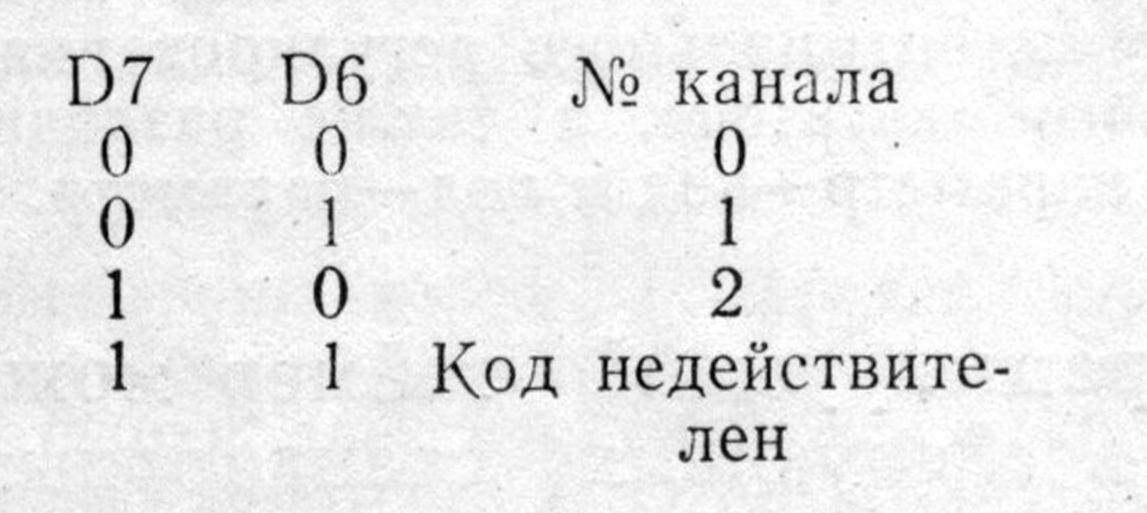
Старшие разряды D6 и D7 — разряды кос-
венной адресации к трем канальным регист-
рам управления, т. е. они определяют, в ка-
кой из регистров управления и какого канала
будут записаны младшие 6 разрядов команд-
ного слова. Кодировка Д7, Д6 задает номер
инициируемого канала:
Разряды D5 и D4 устанавливают режимы
обращения к старшему и младшему байтам
канального счетчика, которым соответствует
лишь один системный адрес:
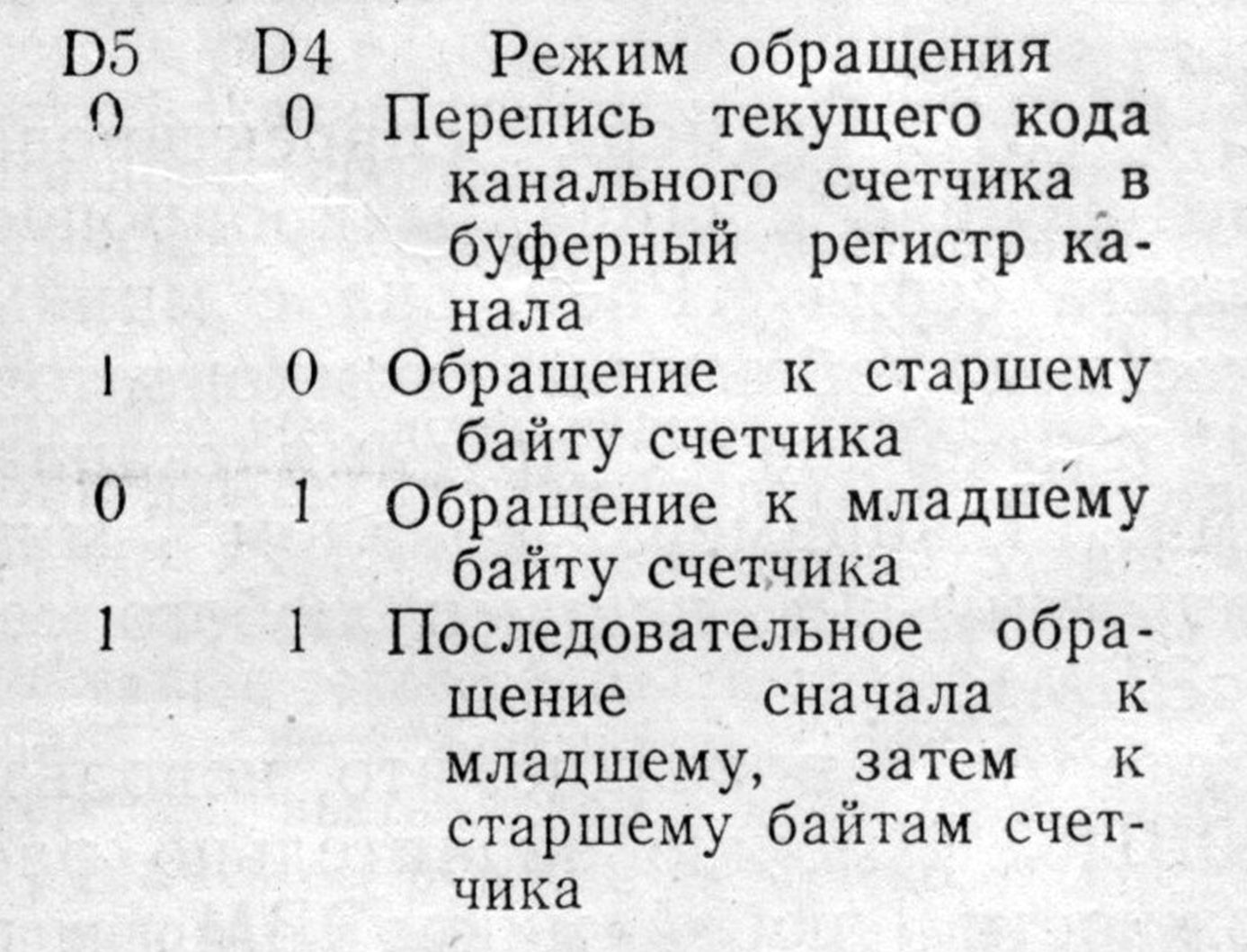
Существенно, что обращаться к адресам
канальных счетчиков, как при начальном
программировании, так и в процессе работы
канала, можно в любой последовательности
номеров каналов и моментов времени обра-
щения. Однако, если канал запрограммирован
на двойное обращение к счетчику (D5=l,
D4=l), то однократное вызовет неправиль-
ную работу канала.
Если перед считыванием кода счетчика
канала было записано командное слово, в
котором D4 = D5 = 0, то при считывании кода
счетчика результат будет получен из буфер-
ного регистра. Это позволяет в процессе счета
запоминать на внутреннем регистре мгновен-
ное значение кода, которое было в момент
записи командного слова, что важно, напри-
мер, при необходимости получить стабильные
значения кода без остановки работы счет-
чика.
Кодировка и описание режимов работы
каналов таймера
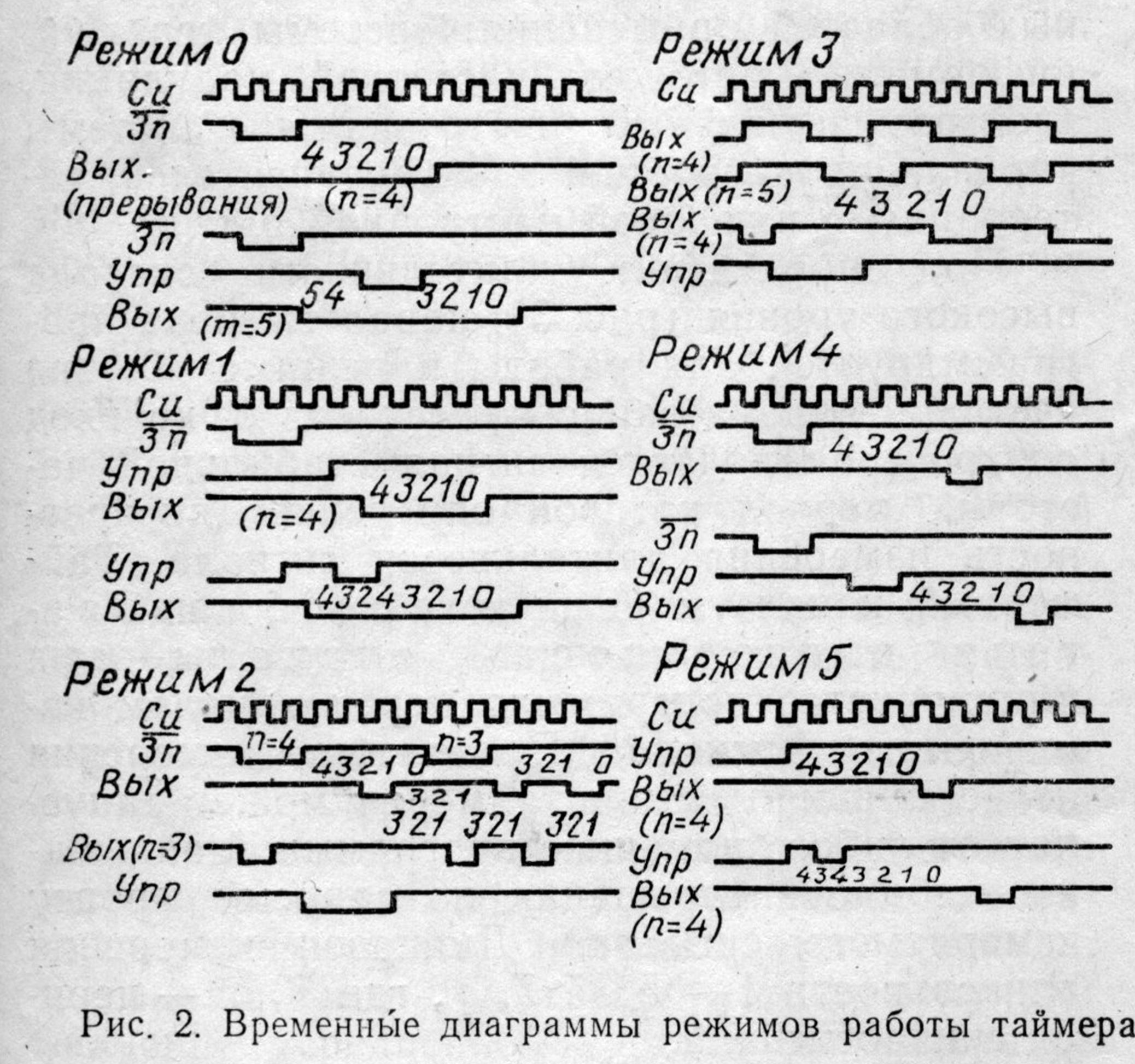
Временные диаграммы работы таймера в
режимах 0—5 даны на рис. 2.
Каждый канал таймера можно использо-
вать в одном из 6 режимов. Номер режима
работы канала определяется кодом разрядов
D3, D2, D1 командного слова:
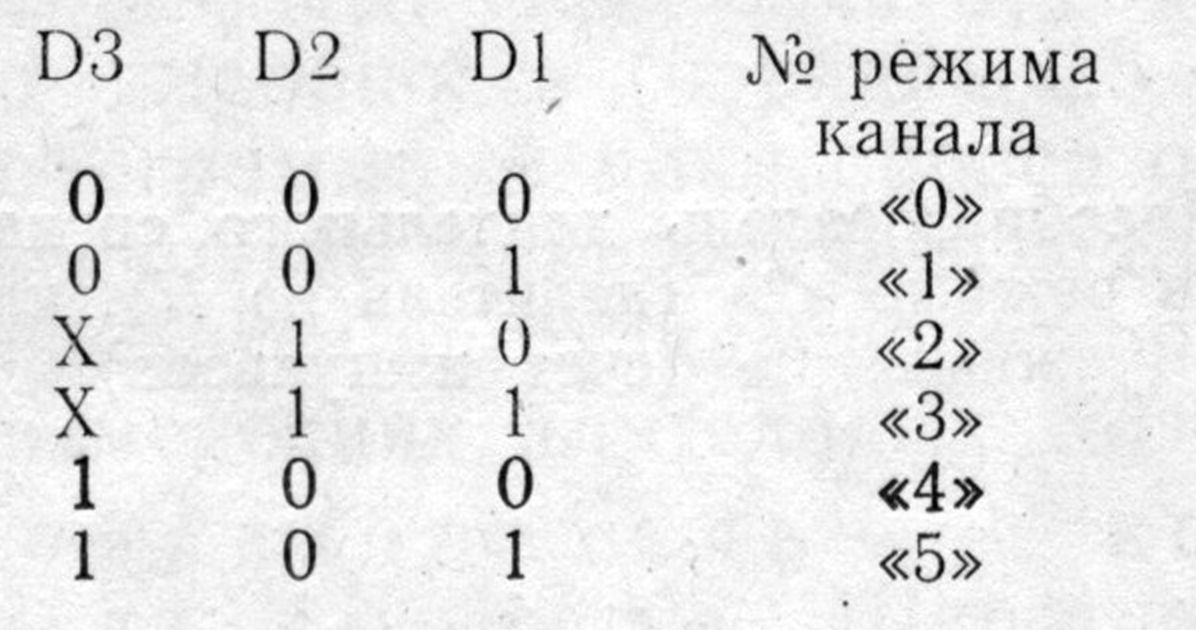
Разряд DO командного слова определяет
режим двоичного (D0 = 0) или двоично-деся-
тичного (D0=1) счета.
Режим «О» — генерация задержанного сиг-
нала прерывания. После инициализации уро-
вень сигнала на выходе канала низкий. При
разрешающем сигнале управления код счет-
чика уменьшается каждым отрицательным
фронтом сигнала синхронизации (вход «Си»).
Г1о достижении кода 0 в счетчике уровень
выходного сигнала становится и остается вы-
соким до записи новой команды пересчета в
счетчик или до новой инициализации канала.
Если счетчик загружается во время счета, то
запись 1-го байта останавливает счет, а за-
пись 2-го начинает новый счет. Когда ре-
жим «О» применяется для генерации сигналов
прерывания, выходной сигнал таймера по-
дается в систему прерывания микроЭВМ.
Режим «1» — программируемый одновиб-
ратор. После инициализации уровень выход-
ного сигнала высокий. Отрицательный фронт
синхросигнала, первый после положительного
фронта сигнала управления, переводит вы-
ходной сигнал в низкий уровень. Уровень сиг-
нала снова станет высоким по достижении
счетчиком терминального кода 0. Таким об-
разом, в режиме «1» канал таймера работает
как одновибратор с программируемой дли-
тельностью выходного сигнала и возможно-
стью многократного запуска. Если счетчик за-
пущен положительным фронтом управляюще-
го сигнала повторно до окончания текущего
цикла, то выходной сигнал удлиняется на
полный цикл с момента повторного запуска.
Загрузка счетчика, одновременная с процес-
сом счета, не изменит длительности текущего
выходного сигнала, но следующим запуском
длительность цикла пересчета изменится.
Режимы «2» и «3» — делитель на N часто-
ты сигналов, приходящих на вход «Си» (N —
код пересчета, записанный на канальный
счетчик). Подробнее эти режимы рассмотре-
ны в разделе «Преобразователь «код — часто-
та».
Режим «4» — программно-запускаемый
задержанный строб. После инициализации
канала в режиме «4» уровень выходного сиг-
нала высокий. После записи кода в счетчик
счет начинается при выссжом уровне управ-
ляющего сигнала. При достижении кода 0 в
счетчике на выходной шине появляется им-
пульс низкого уровня длительностью в один
период синхроимпульса.
Режим «5» — аппаратно-запускаемый за-
держанный строб. Режим «5» отличается от
режима «4» только тем, что счетчик запус-
кается каждым положительным фронтом сиг-
нала управления. Как и в режиме «1», за-
пуск инициирует полный новый цикл счета.
Поэтому, если запуск повторяется до оконча-
ния текущего цикла счета, то выходной сиг-
нал генерируется с установленной задержкой
после повторного сигнала запуска. Переход к
низкому уровню сигнала управления после
запуска очередного цикла счета не влияет на
работу счетчика.
Примеры применения БИС таймера
в качестве устройств сопряжения с объектами
В практике применения микроЭВМ для
решения прикладных задач управления ре-
альными объектами, связь микроЭВМ с этими
объектами через преобразователи физической
величины в числовой код и наоборот пред-
ставляет определенные трудности. Использо-
вание программируемых таймеров позволяет
относительно просто и дешево, с достаточной
для многих случаев точностью решить проб-
лему прямого и обратного преобразования.
Наиболее просто получить преобразователи
код—частота, частота—код, код—длитель-
ность сигнала, и длительность сигнала—код,
причем функция преобразования — линейная.
Для преобразования ко д—ч а с-
тота канал таймера программируется в ре-
жиме «2», при котором на выходе канала по-
являются импульсы длительностью в один
период частоты f син , поданной на канальный
вход синхросерии канала таймера. Период
повторения равен NTclill, где N — код двоич-
ного двухбайтного числа либо в двоичной,
либо в двоично-десятичной системе (в зависи-
мости от запрограммированного режима ра-
боты канала), загруженного в канальный
счетчик; 7СМН — период синхросерии. Таким
образом, коэффициент деления частоты мо-
жет изменяться от 1 до 65536. Максимальный
коэффициент получается при загрузке в счет-
чик кода 0.
Коэффициент деления частоты изменяется
записью кода нового значения коэффициента
деления в счетчики таймерного канала. За-
писать это значение можно во время работы
канала, причем текущий период деления час-
тоты, совпавший с записью, не изменится, а
следующий определится очередным кодом.
Фаза выходного сигнала может быть'син-
хронизирована и программно, и внешним сиг-
налом.
Для программной синхронизации необхо-
димо в регистр управления записать код, ини-
циирующий работу канала в нужном режиме.
После этого первый период пересчета начнет-
ся только по окончании записи кода пересче-
та. Отсюда, момент окончания программной
записи кода пересчета является начальным
моментом отсчета фазы выходного сигнала.
Для аппаратной синхронизации внешним
сигналом следует подать его на управляющий
вход канала. При низком уровне внешнего
сигнала, уровень выходного сигнала остается
высоким. Переход сигнала на управляющем
входе к высокому уровню начинает пересчет
с заданным периодом, таким образом, нача-
ло отсчета фазы — первый отрицательный
фронт синхросерии, появившийся после уста-
новления высокого уровня на управляющем
входе.
Если необходимо получить симметричный
выходной сигнал с коэффициентом заполне-
ния, близким 0,5, то вместо режима «2» в ка-
нале программируется режим «3». При этом
для четных значений коэффициента деления
N длительности положительной и отрицатель-
ной полуволн равны 0,5 NT,и„ . Для нечетных
значений N длительность положительной по-
луволны равна 0,5 (N+l)TcliH , а отрицатель-
ной— 0,5 (N— 1) Гснн . Для получения коэф-
фициентов деления больше 65535, каналы
можно каскадировать. Стабильность выход-
ной частоты определяется стабильностью син-
хросерии.
Описанным выше способом при минималь-
ных дополнительных компонентах (буферные
формирователи, усилители, согласователи
уровней и прочее) можно строить програм-
мируемые генераторы опорных частот с ог-
ромным диапазоном перестройки для различ-
ных областей применения: системы передачи
информации методом частотной модуляции,
электромузыкальные инструменты, системы
управления скоростью электродвигателей, ге-
теродины с цифровой настройкой и т. п.
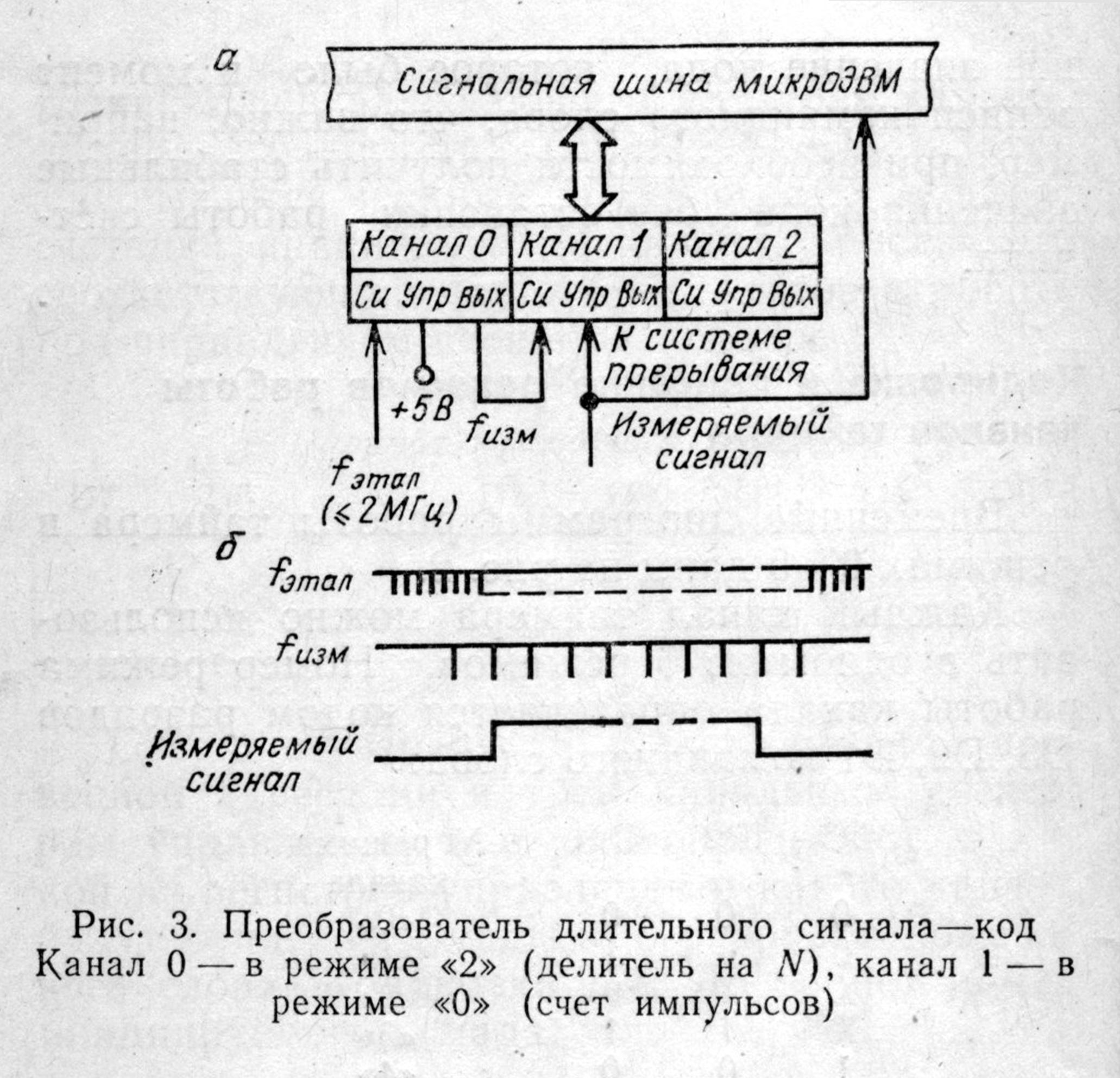
При определении длительности сигнала
высокого уровня (рис. 3), канал таймера про-
граммируется для работы в режиме «0», на
счетчики канала записывается код 0, на вход
синхросерии подается сигнал стабильной ча-
стоты, период которой определяет дискрет-'
ность измерения длительности сигнала. Тай-
мерный канал в режиме преобразова-
теля длительность сигнал а—к о д
инициируется программно перед началом из-
меряемого сигнала. Программа измерения
после инициализации таймеров может запус-
каться либо с помощью программной задерж-
ки, либо от прерывания по заднему фронту
измеряемого сигнала. Диапазон измерения
длительности 1—65535 Гсин , где Гсин —пери-
од синхросигнала.
Для расширения диапазона в сторону уве-
личения в качестве синхросигнала можно
применить выходной сигнал второго канала
таймера, работающего в режиме делителя ча-
стоты. В этом случае можно измерять дли-
тельность сигналов в диапазоне 1 мкс—100 ч.
При окончании измеряемого сигнала програм-
ма измерения считывает код счетчика измери-
тельного канала и вычисляет значение
65535 — N, которое и дает значение длитель-
ности сигнала в периодах синхросерии.
По сравнению с определением длительно-
сти сигнала программным методом цикличес-
кого опроса уровня сигнала, подаваемого на
вход порта, использование программируемых
таймеров обеспечивает более высокую разре-
шающую способность (порядка 0,5 мкс), тог-
да как программный цикл опроса обычно за-
нимает несколько микросекунд). Кроме того,
резко снижается загрузка процессора, особен-
но при измерениях длительных сигналов.
Преобразователь код —д л и-
тельность сигнала. Широтно-импульс-
ная модуляция часто применяется в технике
для управления исполнительными устройства-
ми. В качестве преобразователя код—дли-
тельность можно использовать таймерный
канал в режиме «1». При этом длительность
выходного сигнала таймера будет равна
АТ1ИН . После записи кода в регистре управ-
ления и кода пересчета в счетчики, выходной
сигнал будет иметь высокий уровень. Запуск
«одновибратора» и появление выходного сиг-
нала низкого уровня происходит по положи-
тельному фронту сигнала на управляющем
входе таймера, после чего уровень управляю-
щего сигнала не влияет на выходной сигнал.
Однако следует учитывать, что одновиб-
ратор может быть повторно запущен как до,
так и после окончания выходного сигнала по-
ложительным фронтом управляющего сигна-
ла. В первом случае выходной сигнал удли-
нится и окончится через время NTQliH после
последнего положительного фронта управляю-
щего сигнала.
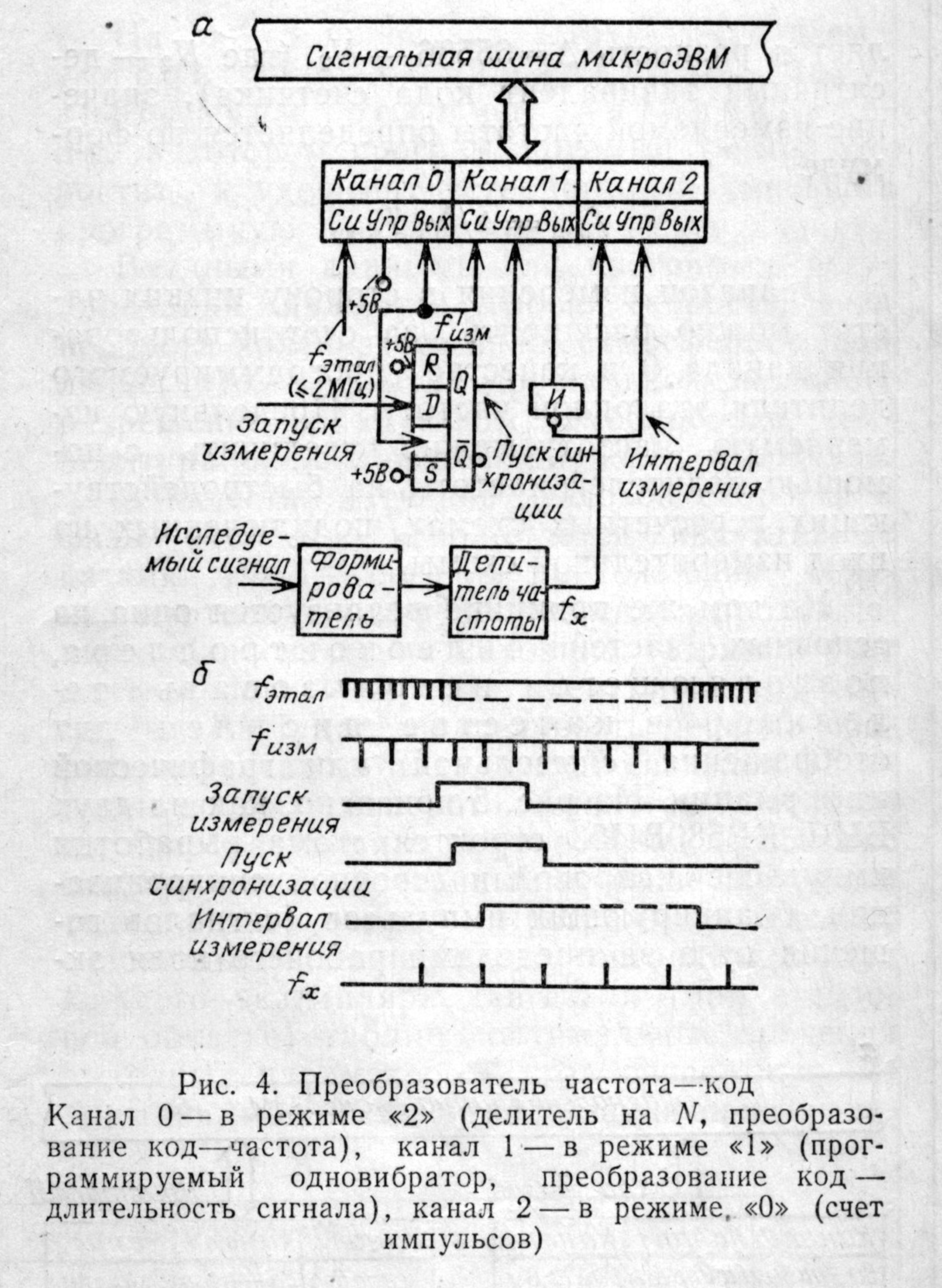
Преобразователь частот а—к о д,
основанный на прямом счете периодов изме-
ряемой частоты за определенный интервал
времени, строится на двух каналах таймера
(рис. 4).
Один из каналов используется в качестве
преобразователя «код—длительность сигна-
ла» и работает в режиме «1». Он генерирует
импульс, длительностью равной интервалу
времени анализа измеренного сигнала, кото-
рый подается на управляющий вход второго
канала, разрешая счет. Второй канал работа-
ет в режиме счета периодов этого сигнала.
Очевидно, что при таком методе получаем
значение усредненной частоты на интервале
времени измерения. Абсолютная погрешность
измерения составляет единицу счета, что
приводит к большим относительным погреш-
ностям при сравнительно коротких интерва-
лах измерения. Максимальная частота изме-
ряемого сигнала определяется предельной ра-
бочей частотой счетчика — fMaкс^2 МГц.
Процесс измерения происходит следую-
щим образом. Первый и второй каналы ини-
циируются в соответствующие режимы рабо-
ты. На счетчик первого канала подается код
длительности интервала измерения N{— '
= тизм/Гэта1, где хизм —длительность интер-
вала измерения, а Гэха1 —период эталонной
частоты.
На счетчик второго канала подается исход-
ный код 0. Генерируемый программно или от
внешнего источника, сигнал «Запуск измере-
ния» запускает первый канал. Сигнал измере-
ния разрешает работу счетчика второго ка-
нала.
По окончании импульса измерения (опре-
деляется путем программного цикла задерж-
ки или с помощью вырабатываемого от зад-
него фронта импульса сигнала прерывания),
считывается код счетчика канала и вычнс-
ляется разность А = 65536 — N2 (где N2 — де-
сятичный эквивалент кода счетчика), значе-
ние измеряемой частоты определяется по фор-
муле

Диапазон измерения в сторону низких ча-
стот можно расширить за счет использова-
ния канала # 0 в качестве программируемого
делителя эталонной частоты. Предельную из-
меряемую частоту можно увеличить с по-
мощью делителей частоты на быстродейству-
ющих пересчетных схемах, подключенных на
вход измерительной схемы.
На том же принципе реализуется одна из
основных частей видеоконтроллера,
позволяющего использовать те-
левизор в качестве дисплея для
отображения символьной или графической
информации. На рис. 5 показано, как на двух
БИС КР580ВИ53 строится схема выработки
импульсов кадровой и строчной синхрониза-
ции, бланкирующих импульсов (сигналов га-
шения луча за пределами рабочего поля эк-
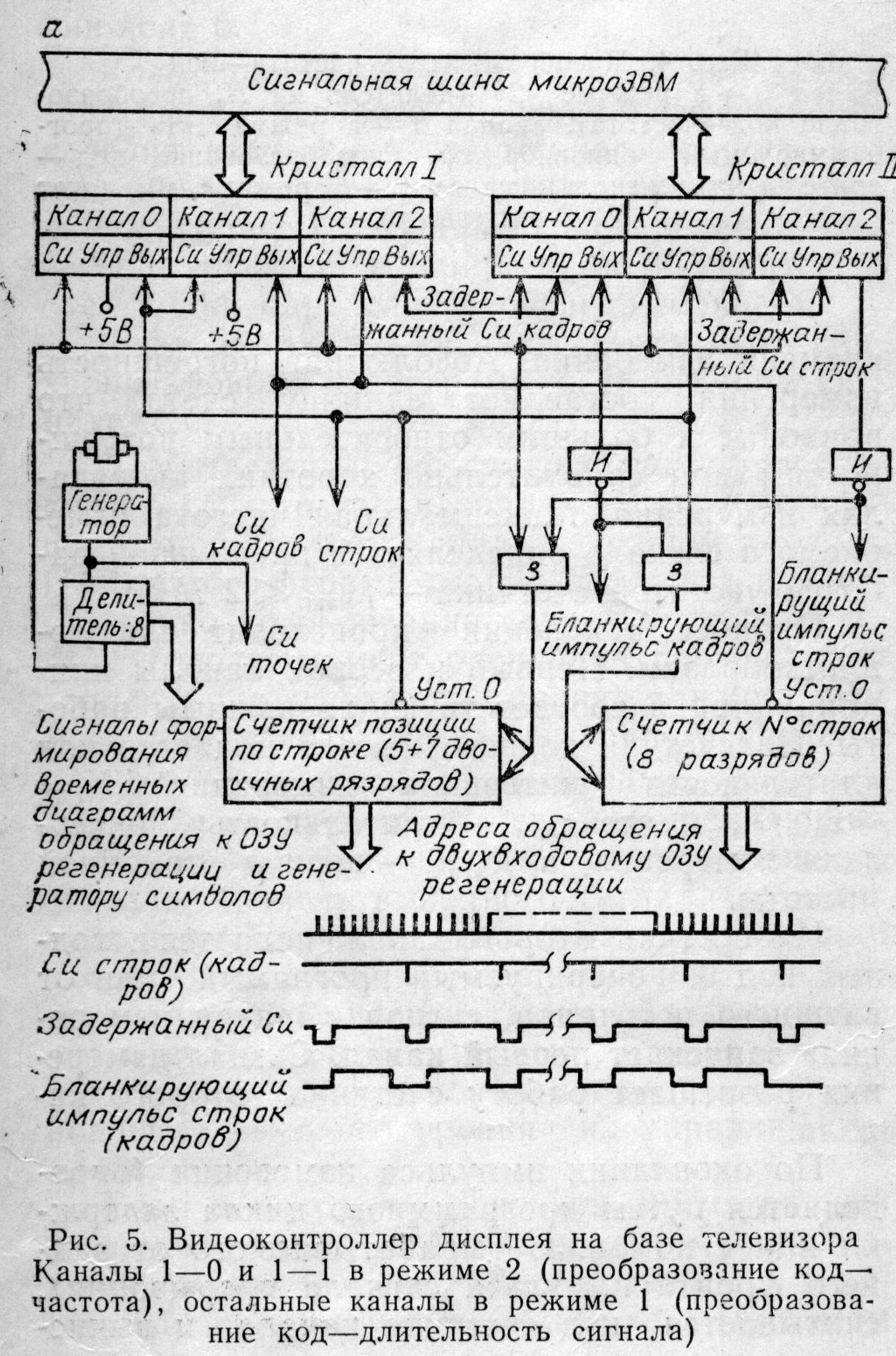
рана) и сигналов управления счетчиками ад-
ресов ОЗУ регенерации.
Достоинство этой схемы, помимо просто-
ты, — возможность программной подстройки
частоты строк и кадров при качаниях частоты
питающей сети (что обычно приводит к ко-
лыханию изображения).
Преобразователи напряжени е—
код и сопротивление/емкость—код
в отличие от прямых методов преобразова-
ния, описанных выше, требуют введения до-
полнительного аналогового преобразователя
физической величины в длительность или час-
тоту сигнала. Весьма удобен для этой цели
аналоговый таймер КРЮ06ВИ1 [2, 3].
На рис. 6 показан трехканальный преоб-
разователь аналог—код. Аналоговые таймеры
переводят измеряемое напряжение в длитель-
ность выходного сигнала, которая преобра-
зуется в код на одном из каналов цифрового
таймера КР580ВИ53. Быстродействие указан-
ных преобразователей из-за используемого
метода прямого счета не очень высокое, зато
независимость и дешевизна каждого из кана-
лов, а также легкость мультиплексирования
их цифрового выхода, позволяют иметь доста-
точно много параллельно работающих кана-
лов. Так как при рабочей частоте /этал =2 МГц
8-разрядное преобразование для всех каналов
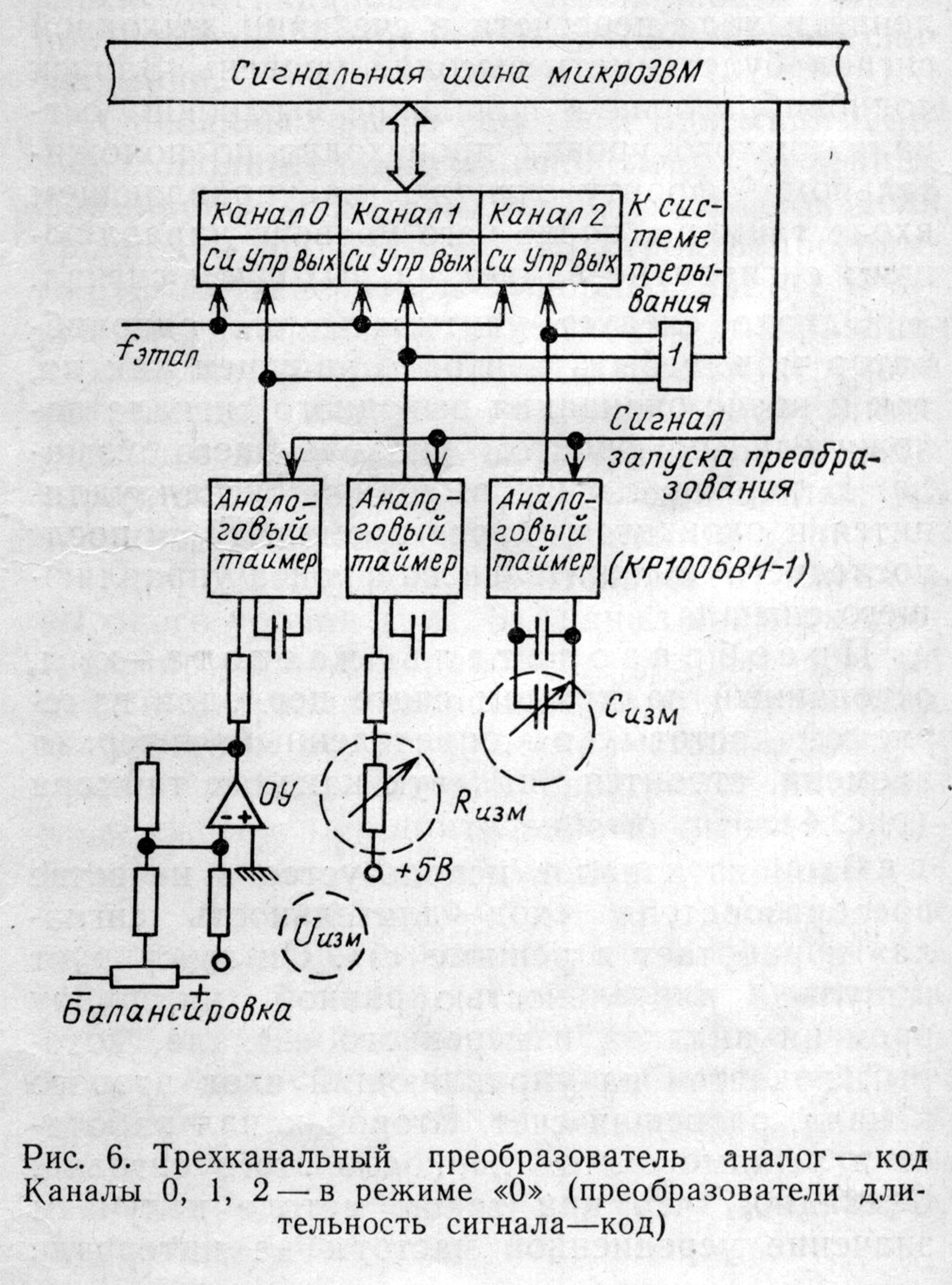
занимает около 200 мкс, то есть возможность
эффективно применять такие преобразовате-
ли для многоканального ввода относительно
медленно меняющихся сигналов (до 200 Гц)
без использования аналоговых запоминающих
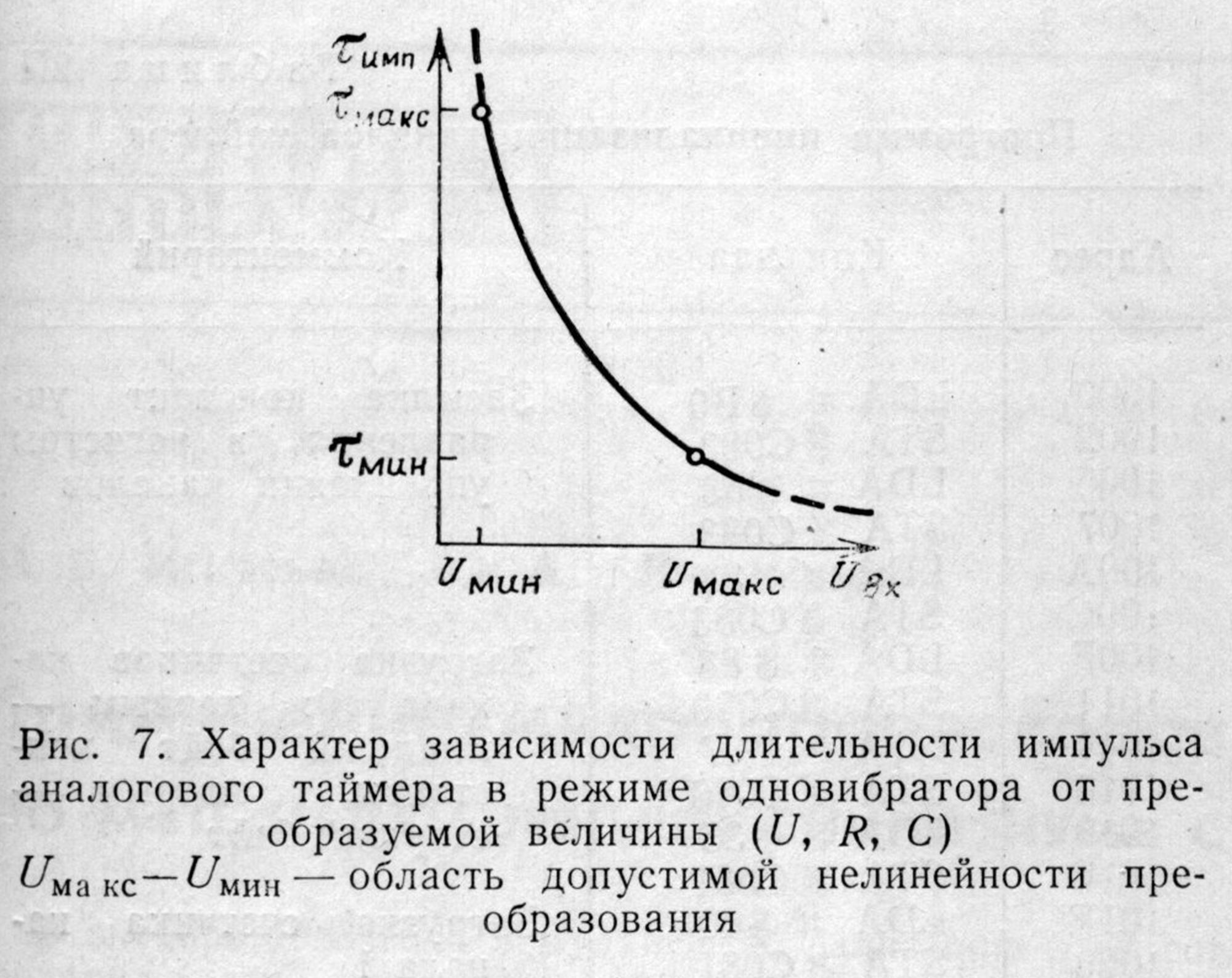
усилителей на входе преобразователя. Хотя
линейность аналогового преобразователя не-
высока (рис. 7), программные методы кор-
рекции нелинейности (например, с использо-
ванием таблицы поправок), позволяют эффек-
тивно бороться с этим недостатком.
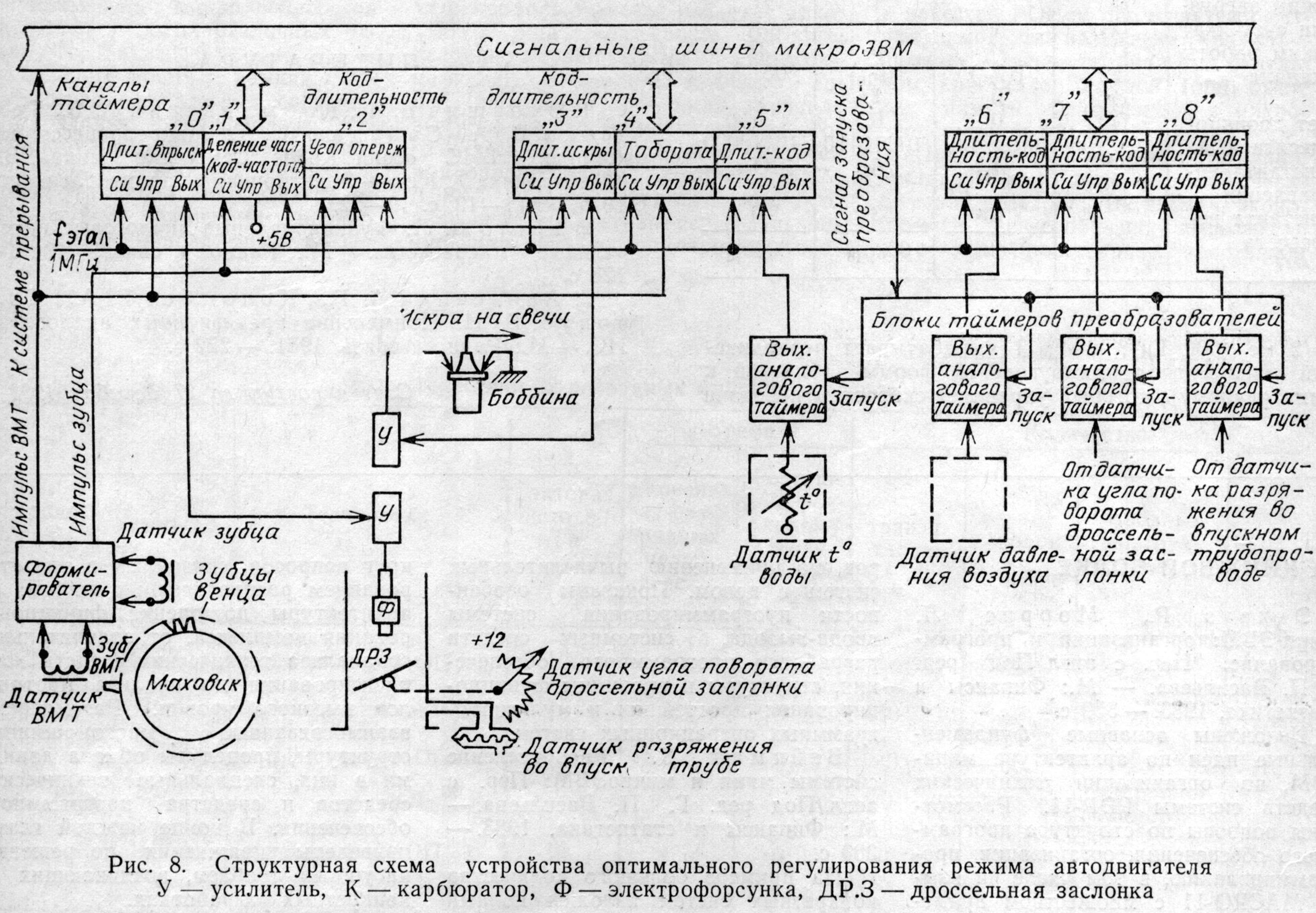
На рис. 8 приведена структурная схема
устройства оптимального регу-
лирования режима автодвигате-
ля, в котором программируемый таймер уп-
ростит и удешевит устройство и уменьшит
программную нагрузку на процессор.
Входными данными для программы регу-
лирования являются угловая скорость, фаза
поворота коленчатого вала, атмосферное дав-
ление, угол открытия дроссельной заслонки,
разрежение во впускном трубопроводе, тем-
пература охлаждающей жидкости и воздуха.
В качестве датчиков угловой скорости и
фазы поворота используются индуктивные
датчики ВМТ — сигнала прохождения верх-
ней мертвой точки и ЗБ — сигнала прохожде-
ния зубца на венце маховика. Прямой счет
длительности интервала времени между сиг-
налами ВМТ дает длительность периода обо-
рот^ коленчатого вала, а счет сигналов ЗБ —
текущую фазу поворота. Аналоговые величи-
ны преобразуются р цифровой код за 250 мкс
одновременно описанными выше методами
(один раз за оборот). Программа вычисляет
с помощью индивидуально составленных для
каждого экземпляра двигателя (при стендо-
вой обкатке) таблиц оптимальные значения
выходных параметров — угол опережения за-
жигания, мощность сигнала зажигания и дли-
тельность импульса открывания топливной
форсунки, и посылает цифровой код этих па-
раметров на таймеры-преобразователи, пус-
каемые внешним сигналом ВМТ.
Таким образом, процессор для вычисления
параметров имеет интервал времени, равный
периоду оборота коленчатого вала (нет необ-
ходимости тратить время процессора на пря-
мое и обратное преобразование аналоговых
величин), что позволяет работать на скоро-
стях вращения (6—7) • 103 об./мин.
Приложение
Пример программы для таймера
на языке ассемблер персональной ЭВМ «Агат»
Трехканальный таймер действует следующим обра-
зом: канал 0 в режиме деления эталонной частоты.ге-
нерирует сигналы временного прерывания с периодоу
Таблица 1П
Значение и шестнадцатеричные коды констант
управления и пересчета для каждого канала,
используемые в программе инициализации
Таблица 1П
|
Разряд |
Канал 0 |
Канал 1 |
Канал 2 | |
|
№ канала Режим загруз- Счет двоично- |
D7 DO . |
0 1 0 1 (210) 00110100 104 |
0 0 НЗ-ю) 0 01110110 53 |
0 0(0Ю) 10110000 0 |
|
ресчета |
078816 |
003516 |
0000; е |
Т0 = 2 мс (500 Гц); канал 1 вырабатывает периодиче-
ский синхросигнал прямоугольной формы (близкой к
симметричному), который управляет скоростью передачи
Программа инициализации каналов таймера
Программа инициализации каналов таймера
|
Адрес |
Команда |
Комментарий |
|
1000 |
LDA # ^В0 |
Засылка констант vn- 1* |
|
1002 |
STA $ С083 |
равления в регистры |
|
1005 |
LDA # ^53 |
управления каналов |
|
1007 |
STA $ С083 | |
|
100 А |
LDA # ф34 j | |
|
юос |
STA $ С083 | |
|
100F |
LDA # ^88 |
Загрузка счетчиков ка- |
|
1011 |
STA jf C080 |
нала 0: первым — |
|
1014 |
LDA # $ 07 |
младший байт кон- |
|
1016 |
STA $ C080 |
станты, вторым — |
|
1019 |
LDA # $ 35 |
старший байт |
|
101В |
STA $ C081 | |
|
101Е |
LDA # $00 |
Загрузка счетчика ка- |
|
1020 |
STA $ C081 |
нала 1 |
|
1023 |
STA * C082 | |
|
1026 |
STA $ С082 |
Загрузка счетчика ка- |
|
нала 2 |
в линию информации с последовательного интерфейса
(номинальная скорость— 1200 бод.; fCu =1200X16=»
= 19 200 Гц); канал 2 используется в качестве преоб-
разователя длительность сигнала—код.
Частота подается от кварцованного генератора
(f эгал =1 МГц).
Адреса обращения к регистрам таймера следующие:
регистр управления — C083i6, счетчик канала 2 —
C082i6, канала 1 — С081 i6, канала 0 — C080i6:
ЛИТЕРАТУРА
1. 3 у б а ш и ч В. Ф., К о б ы л и н с к и й А. В., Т е м-
ч е н к о В. А., С а б а д а ш Н. Г. Микропроцессорный
комплект БИС серии К580. Семейство микроЭВМ
«Электроника К1». — Электронная промышленность,
1979, № 11 — 12, с. 19—22.
2. Шило В. Л. Функциональные аналоговые интег-
ральные микросхемы. — М.: Радио и связь, 1982.—
128 с.
3. А л е к с е н к о А. Г., К о л о м б е т Е. А., Ста-
ро дуб Г. И. Применение прецизионных аналоговых
ИС. —М.: Радио и связь, 1981. —222 с.
Статья поступила 27 декабря 1983 г.
НА КНИЖНОЙ ПОЛКЕ
Экхауз Р., Моррис Л.
Мини-ЭВМ: организация и програм-
мирование: Пер. с англ./Под ред.
Г. П. Васильева. — М.: Финансы и
статистика, 1983. — 359 с.
Изложены основные фундамен-
тальные идеи по архитектуре мини-
ЭВМ, по организации технических
средств системы PDP-11. Рассмот-
рены вопросы по структуре програм-
много обеспечения, организации, про-
граммированию, в том числе на язы-
ке MACRO-И с множеством приме-.
ров, по применению вычислительных
систем в целом. Показаны особен-
ности программирования системы
ввода-вывода, системных средств
разработки программного обеспече-
ния, структуры и принципы функцио-
нирования простейших и мультипро-
граммных операционных систем.
Вейцман К. Распределение
системы мини и микроЭВМ: Пер. с
англ./Под ред. Г. П. Васильева. —
М.: Финансы и статистика. 1983.—
380 с.
На примере большого количества
конкретных систем изложен полный
круг вопросов, связанных с проекти-
рованием распределенных систем: от
архитектуры до оценки функциони-
рования комплекса, от сравнительно-
го анализа технических средств ком-
плексирования до анализа протоко-
лов высокого уровня. Рассмотрены
взаимосвязанные многомашинные
структуры, процедуры обмена данны-
ми в них, специальные технические
средства и средства программного
обеспечения. В конце каждой главы
приведены упражнения по решению
насущных проблем, возникающих *
конкретных разработках.