
А. К. Платонов
ПРОБЛЕМЫ РАЗРАБОТКИ
МИКРОПРОЦЕССОРНЫХ СРЕДСТВ
ДЛЯ СИСТЕМ УПРАВЛЕНИЯ РОБОТОВ
Наиболее перспективный способ создания системы
управления робототехническими комплексами (РТК) —
разработка заказных микропроцессорных средств приме-
нительно к задаче и требуемой конфигурации РТК.
В истории развития средств автоматизации техно-
логических процессов в машиностроении прослеживают-
ся два пути реализации систем программного управ-
ления: использование универсальных средств и созда-
ние специализированных систем. Универсальность дикто-
валась сложностью задачи управления, необходимостью
адаптации к разнотипному оборудованию и сокраще-
нием сроков разработки. Эволюция программных
средств автоматизации технологических процессов при-
села к созданию специализированной области электро-
ники для автоматизации производства на основе соот-
ветствующей элементной базы. Специализация опреде-
ляется специфическими требованиями к архитектуре,
составу и характеристикам элементов систем програм-
много управления промышленных роботов (ПР) и ро-
бототехнических систем (РТС). При этом учитываются
ограничения стоимости и уровня эксплуатационного об-
служивания, а также требования со стороны програм-
много обеспечения.
Эти условия не могут быть удовлетворены без соз-
дания заказных и полузаказных микропроцессорных
ср:дств для цифро-аналоговой обработки и преобразо-
вания измерительных и управляющих сигналов. Выпол-
нение этих условий позволит увеличить надежность обо-
рудования систем управления и сократить сроки их
внедрения и переналадки.
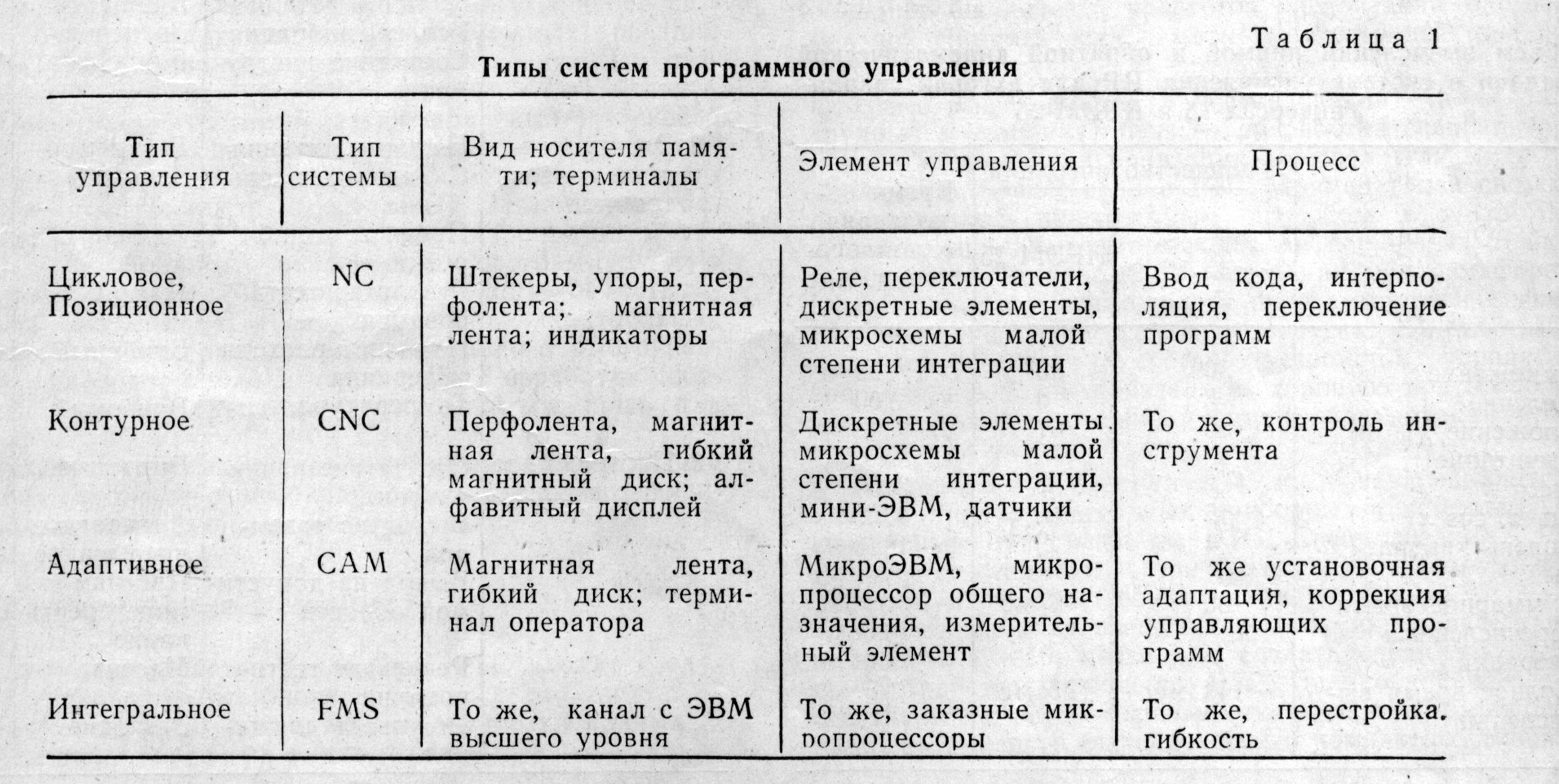
В табл. 1 отражена тенденция развития элементной
базы системы управления (СУ) — переход ко все более
интегрированным и специализированным функциональ-
ным блокам с одновременным усложнением функций
управления. Ниже будет показано, что это требует раз-
работки специальных средств в рамках системного под-
хода, объединяющего усилия разработчика РТС, алго--
ритмов с их программным обеспечением, архитектуры
СУ и разработчика элементной базы.
Системы управления робототехники
Специфика требований к системам управления робо-
тотехники возникает в связи с тем, что СУ соединяет
механические, электро- и (или) гидромеханические, из-
мерительные, сигнальные (сенсорные) и электронные
устройства в единую систему, приспособленную к усло-
виям эксплуатации РТС в различных производствах.
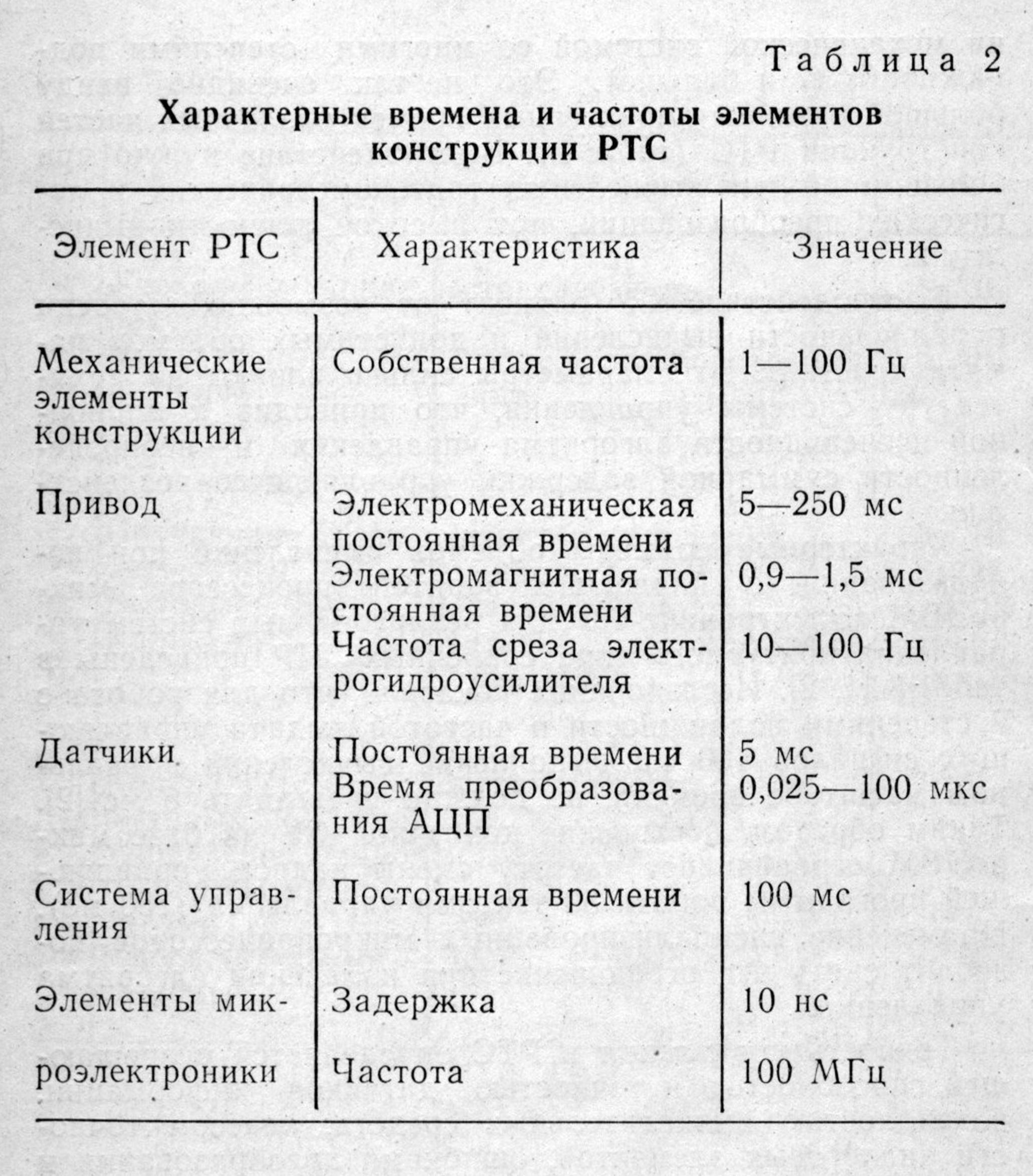
Быстродействие существующих элементов электро-
ники (с тактовой частотой до 100 МГц) недостаточно
для цифрового уравнения в реальном масштабе време-
ни механической системой со многими степенями под-
вижности (7 и больше). Это не так очевидно ввиду
большой разницы характерных времен различных частей
конструкции РТС (табл. 2). Быстродействие нужно при
большом объеме вычислений, тригонометрических и ло-
гических преобразований, при высокой точности вычис-
лений.
Быстродействие СУ зависит от возможной степени
параллельности вычислений и допустимых объемов па-
мяти констант. Эти параметры сильно влияют на архи-
тектуру системы управления, что приводит к априор-
ной неочевидности алгоритма управления и неопреде-
ленности суммарной задержки управляющего воздейст-
вия.
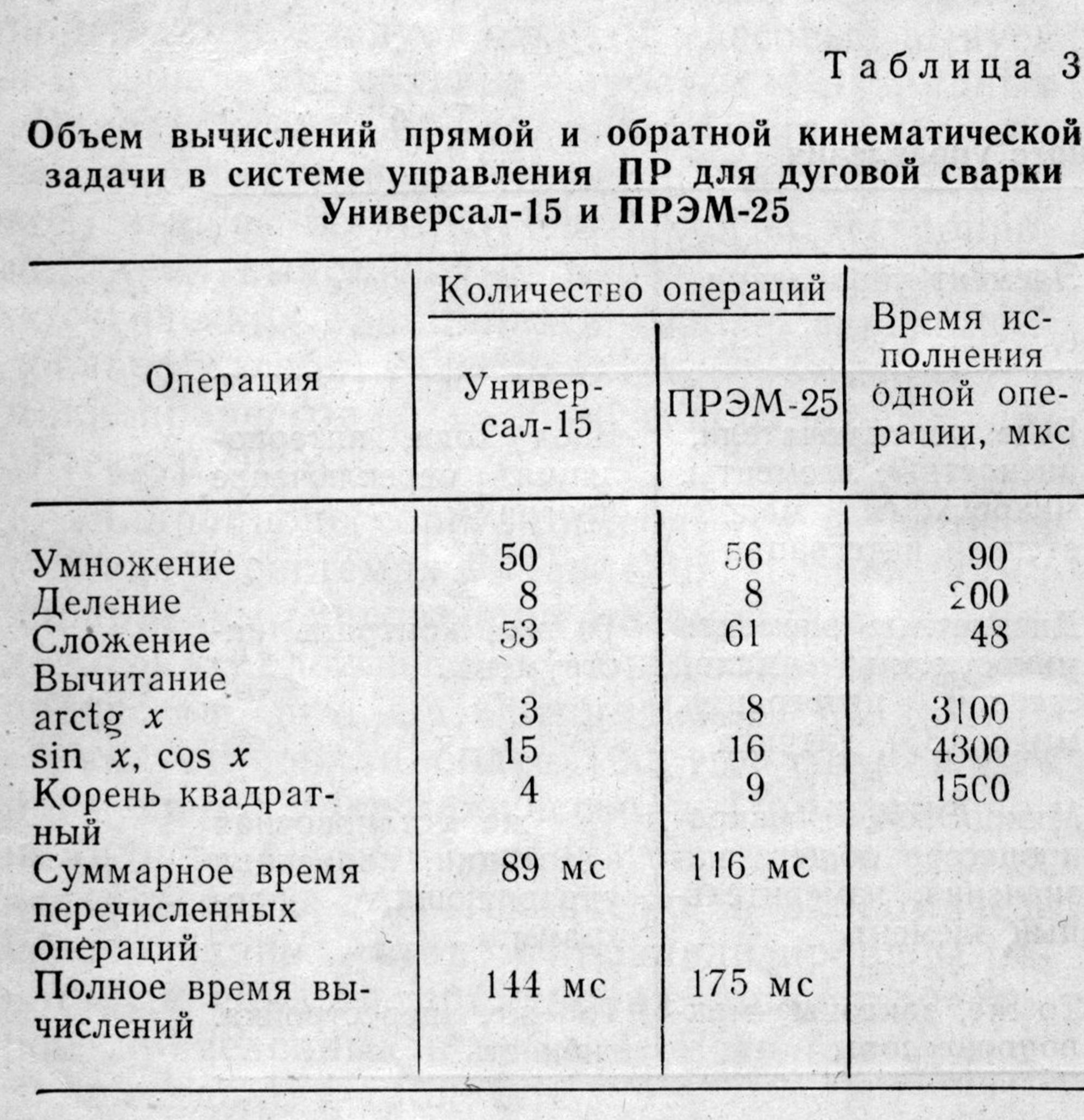
Характерные примеры объемов вычислений при ис-
пользовании с плавающей запятой процессора мик-
роЭВМ «Электроника-60» для реализованных систем уп-
равления контурного типа сварочных ПР приведены в
табл. 3 [1, 2]. Исследования показали, что для робота с
7 степенями подвижности и частотой выдачи управляю-
щих сигналов 100 Гц выполнение вычислений в реаль-
ном масштабе времени, не должно превышать 6 мс [2].
Таким образом, построение контурной СУ на базе мик-
роЭВМ ограничивает частоту смены кадров управляю-
щей программы робота 30 тактами управления (180 мс).
Применение специализированных микропроцессоров по-
зволит спять это ограничение при изменении алгоритма
управления.
Точность управления в РТС определяется разрешаю-
щей способностью и точностью датчиков информации,
разрядностью вычислительных средств, классом точно-
сти аналоговых элементов, ошибками преобразования и
стабильностью блоков питания.
Допустимый уровень погрешности в РТС чрезвычай-
но низок. Например, у ПР с вылетом руки 1 м при за-
данной точности позиционирования в задаче сварки
0,1 мм допустимая суммарная погрешность равна
0,01%, что требует точности работы элементов его си-
стемы управления в диапазоне ±0,001%.
Как правило, все вычисления в системе управления
ПР должны вестись с 16- или 32-разрядными двоичны-
ми числами, желательно в плавающем формате. Это
следует из необходимости вычислять квадраты линей-
ных размеров звеньев робота в единицах дискретности
датчиков и из наличия разностей близких величин при
определенной конфигурации ПР. Соответственно датчи-
ки должны иметь не менее' 14 двоичных разрядов, а
аналоговые элементы — компенсационные и калибро-
вочные цепи коррекции, входные фильтры и оптоэлект-
ронные преобразователи в цепях питания. Использова-
ние специализированных и заказных БИС для каждого
конкретного типа СУ облегчает достижение нужной точ-
ности.
Надежность работы микроэлектронной элементной
базы в системах управления ПР имеет особое значение.
Сбой или отказ РТС даже в условиях производства,
гибкого к отказам, влияет на ход выполнения производ-
ственной программы. К тому же условия работы систе-
мы управления — вибрация, запыленность воздуха, тем-
пература, влажность, электромагнитные поля, уровень
помех по цепям питания — значительно хуже приня-
тых в вычислительной технике.
Для высокой надежности каждой конкретной РТС
следует разрабатывать специальные средства функци-
онального резервирования, защиты от воздействий
внешней среды и развивать средства диагностики и са-
модиагностики элементов оборудования. При этом пра-
вомерно требовать, чтобы одиночный отказ не прекра-
щал функционирования, а двойной отказ не нарушал
техники безопасности.
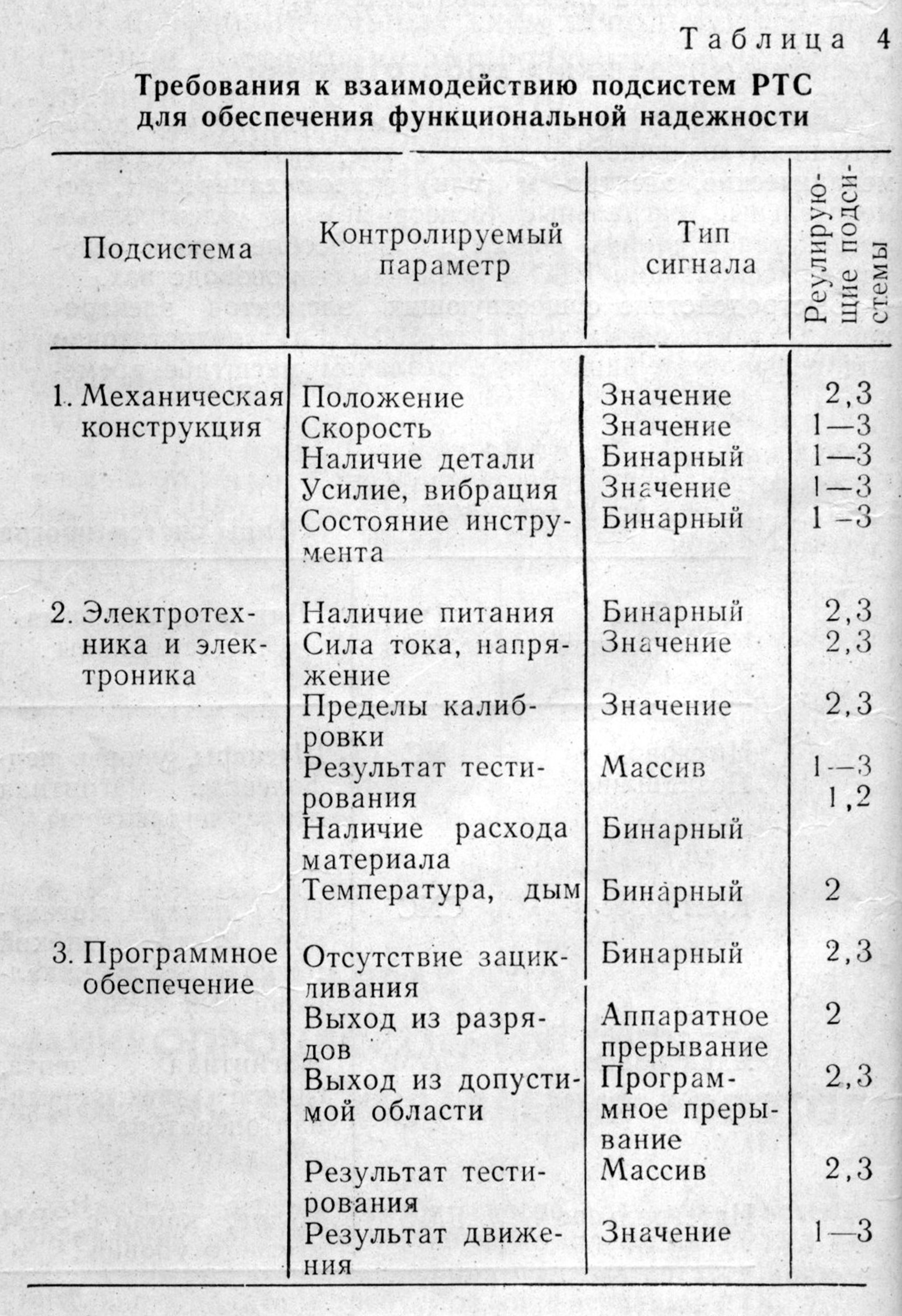
Разбивая систему управления ПР на три главные
компоненты — механику, электронику и программное
обеспечение, можно сформулировать (табл. 4) систем-
ные требования к аппаратно-программной надежности
работы. Возможность ее реализации должна быть зало-
жена на уровне специализированной для данной РТС
элементной базы и предусмотрена при конструировании
и механической, и электронной компонент системы.
Другие системные требования связаны с особенно-
стями интерфейса, обеспечивающими возможность пе-
рекопфигурации и развития. Это касается прежде всего
способов соединения элементов и устройств в единую
систему.
В современной РТС интерфейс должен обеспечивать:
— параллельный и последовательный обмен данны-
ми, иногда на удалении в несколько километров (напри-
мер, в случае загрузки данными подземного робота во
взрывобезопасном исполнении из наземной ЭВМ);
— контроль обмена данными (т. е. требуется про-
цессор обмена, а не простой буферный регистр);
— селективность и мультиплексность обмена в зави-
симости от терминальных устройств;
— прием и передачу входных и выходных данных
аналогового и цифрового вида, иногда большой мощно-
сти или частоты;
— прямой доступ к памяти;
— динамически изменяемый приоритет обмена;
— работу в реальном масштабе времени;
— перекопфигурацию системы и ее расширение.
Набор требований и их параметры существенно из-
меняются от системы к системе.
У распространенной в настоящее время шинной (ма-
гистральной) логики интерфейса есть, как показал опыт,
недостатки: увеличиваются накладные аппаратные рас-
ходы на приемо передающие модули для интерфейсных
блоков; снижается быстродействие из-за ограниченной
пропускной способности шины; возрастает необходи-
мость в дополнительном оборудовании (удлинители
шин) при большом числе взаимодействующих элемен-
тов.
В то же Бремя параллельный и последовательный
интерфейсы в мультиплексных и селекторных системах
обмена данными приводят к разделению времени рабо-
ты канальных устройств и соответствующему дополни-
тельному программному обеспечению. При использова-
нии многопортовой общей памяти усложняется обору-
дование запоминающих устройств.
Таким образом, каждая из трех логик интерфейса —
разделение шины, процессора и памяти — не имеет оче-
видного преимущества перед другими, и выбирать логи-
ку надо в соответствии с конкретными условиями и
ограничениями, разрабатывая архитектуру системы при-
менительно к ее особенностям.
При выборе системного интерфейса устройства уп-
равления важно наличие или отсутствие аналоговых
сигналов, соответствующих преобразователей, коммута-
торов процессоров обработки информации. Большое чи-
сло аналоговых сигналов (до 35 для манипулятора 7
степенями свободы и позиционными, скоростными и си-
ломоментными датчиками) и высокая частота их пос-
тупления (до 10 кГц для дальномерных устройств ПР)
диктуют необходимость параллельной обработки данных
с соответствующими интерфейсом и архитектурой.
Результат работы РТС должен быть детерминиро-
ван. Это порождает еще одно системное требование —
применение средств преодоления неорганизованности
внешней среды РТС и возможных отклонений в работе
оборудования РТС. Функциональное назначение «детер-
минаторов» — преобразовать случайное множество
значений фазового вектора состояний РТС в набор сиг-
налов, формирующих множество возможных реакций
РТС и ее не случайное, предопределенное целевым наз-
начением, поведение.
Аппаратно-программный («интегральный») способ
реализации «детерминаторов» системы — единственно
возможный в случае использования аналоговых элемен-
тов невысокой точности в составе РТС. Элементная ба-
за и программное (в том числе и микропрограммное)
обеспечение должны реализов ать программируемую
фильтрацию данных [3], словари ситуация—объект, си-
туация—действие [4] и сложный набор контрольных
движений робота, описываемый с помощью многоуров-
невого графа состояний и условий [5]. Разработка соот-
ветствующих элементов может проводиться лишь для
конкретных РТС.
Экономические требования к средствам автоматизации
производств диктуют необходимость упрощения элемен-
тов электроники путем их специализации.
Схемотехнические решения
В состав устройства управления РТС входят следу-
ющие функциональные блоки:
— препроцессоры для приема и обработки данных;
— системы обработки видеосигналов;
— логические преобразователи типа словаря ситу-
ация—действие;
—диагностические процессоры;
— процессоры построения движений робота и управ-
ления оборудованием;
— постпроцессоры и контроллеры приводов РТС и
технологического оборудования;
— команд-аппараты для управления силовыми цепя-
ми;
— преобразователи координат;
— функциональные спецпроцессоры;
— диалоговые средства программирования (обуче-
ния) и тестирования.
Реализация таких блоков с помощью стандартной
элементной базы целесообразна на этапе отработки ло-
гической схемы и конструкции РТС.
Минимальный набор микропроцессорных элементов
для РТС должен включать: процессор с микропрограм-
мным управлением, память микропрограмм, программи-
руемый таймер, ОЗУ, ПЗУ (или полупостоянное ЗУ),
шинообразующее оборудование, сдвиговые регистры для
быстрых буферов, асинхронные и синхронные каналы
передачи данных, модемы, программируемый интерфейс,
контроллеры терминального оборудования, кодеры, де-
кодеры и генераторы символов. Дополнительно необхо-
димы АЦП, ЦАП, коммутаторы, компараторы и преоб-
разователи аналоговых сигналов, стабилизаторы, усили-
тели и ограничители мощности, а также конструктивы
и разъемы для работы в сложных условиях.
Устройства управления РТС на базе микроЭВМ на-
иболее распространены. Использование серийной мик-
роЭВМ [2] сокращает сроки разработки при заданном
уровне универсальности и надежности.
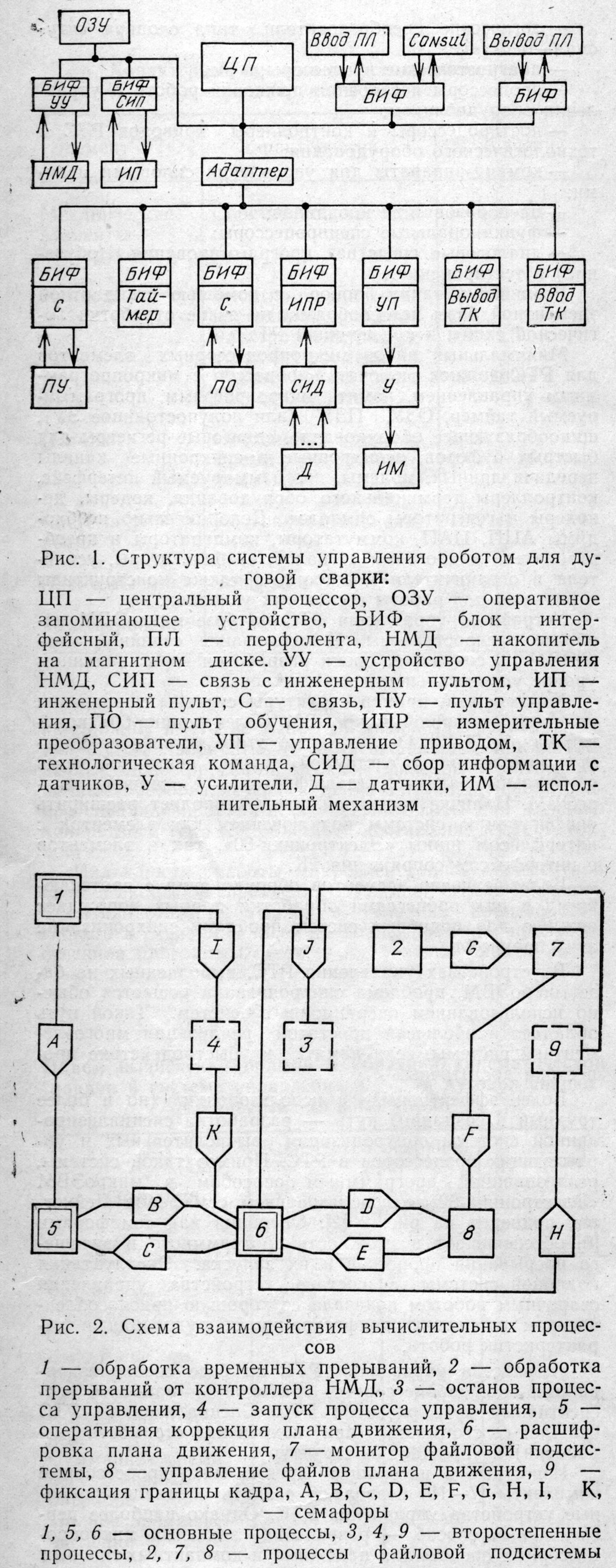
Характерный пример структуры системы управления
на основе серийной микроЭВМ «Электроника-60» пока-
зан на рис. 1 [2]. Особенностью этого устройства явля-
ется использование системной шины, связанной через
специальный адаптер (дешифратор) с шиной мик-
роЭВМ. Наличие системной шины позволяет расширить
конфигурацию системы подключением как элементов с
интерфейсом шины «Электроники-6(Ь так и элементов
с интерфейсом сопряжения 2К.
Большое число элементов оборудования с протекаю-
щими в них процессами обработки данных порождает
важную для подобных систем проблему синхронизации
этих процессов.
В устройствах управления РТС, выполненных на ба-
зе микроЭВМ, проблема синхронизации решается обыч-
но использованием операционных систем. Такой путь
обладает наибольшей простотой реализации многоэле-
ментной системы, если память и быстродействие про-
цессора достаточны.
Более эффективный в использовании (но и более
трудный в создании) путь — разработка специализиро-
ванной системы синхронизации вычислительных и уп-
равляющих процессоров в РТС. Пример такой системы,
реализованной программным способом в микроЭВМ
«Электропика-60» с использованием семафоров Дейкст-
ры, приведен на рис. 2 [2]. Операции над семафорами
[6] обеспечивают возможность программного и внешне-
го прерывания процессов и их запуска. Эксплуатация
подобной системы в составе устройства управления
сварочным роботом показала ее хорошую приспособлен-
ность к изменению конфигурации оборудования и ха-
рактеристик робота. . |
Устройства управления РТС на базе специализиро-
ванных микропроцессорных приборов — наиболее пер-
спективный путь развития РТС. Специализация РТС
снижает ее стоимость (при сохранении стоимости раз-
работки) и упрощает ее структуру.
Известные в настоящее вр-емя микропроцессорные
комплекты [7—10] позволяют создать специализирован-
ные устройства управления РТС. Однако наиболее пер-
спективный способ — разработка заказных микропро-
цессорных средств для надежных и компактных типовых
элементов применительно к задаче и требуемой конфи-
гурации РТС.
Схема взаимодействия процессов, (см. рис. 2), может
быть реализована с помощью нескольких микропроцес-
сорных элементов, имеющих в своем составе блоки
1—4, 7—9 с соответствующими семафорами и блоки 5 и
6 в одном или двух корпусах. При этом объединение
системы прерываний и файловой системы в одном мик-
ропроцессорном элементе возможно в связи с малым
числом источников внешнего прерывания и специализи-
рованными условиями потока данных из внешней памя-
ти в оперативную (покадровое считывание с последую-
щей интерпретацией в блоках 5 и 6).
Разработка средств создания
заказных устройств управления РТС
Характеристики элементной базы РТС должны быть
согласованы со всеми .уровнями системы управления.
Это требует конструирования всей системы и элементов
одновременно. Иными словами, системные качества
РТС могут быть получены лишь при формировании
характеристик элементов в рамках системного подхода.
Как известно, цикл разработки интегральной схемы
(БИС) состоит из следующих стадий [11]:
1. Функциональное описание устройства БИС.
2. Логическое описание устройства БИС.
3. Схемотехническое описание устройства БИС.
4. Проектирование геометрии отдельных слоев БИС.
5. Контроль электрических и тепловых ограничений.
6. Расчет технологического процесса.
7. Формирование управляющих программ для изго-
товления шаблонов.
8. Тестирование шаблонов.
9. Изготовление шаблонов.
10. Изготовление БИС.
Задача состоит в том, чтобы дать автору системы уп-
равления РТС средства самостоятельной разработки не-
обходимой элементной базы на этапах 1—7 при оказа-
нии ему консультативной помощи предприятием-изгото-
вителем микросхем. Для этого нужна специальная диа-
логовая система автоматизированного проектирования
(САПР) заказных БИС. САПР должна содержать фор-
мализацию технологических ограничений на этапах 3—6
и практических приемов синтеза микросхем на этапах
7—10, а также средства определения критериев каче-
ства, соответствующих принципиальным решениям на
каждом из этапов.
Чтобы определить функциональное назначение каж-
дой БИС (этапы 1, 2) в процессе комплексного проек-
тирования РТС надо:
I. Установить состав независимых функциональных
' блоков РТС, которые можно рассматривать в виде тер-
миналов управляющей ЭВМ.
Например, для шестиногого шагающего робота, од-
ного из наиболее сложных, было выделено 104 терми-
нальных узла [13], группируемых в восемь функциональ-
ных блоков.
11. Выделить цифровые и аналоговые потоки инфор-
мации и определить требования к быстродействию и со-
ответственно числу каналов и преобразователей.
III. Для независимых параллельных процессов в си-
стеме управления построить граф их информационных
связей, где вершины — процессы в системе управления,
а ребра помечаются частотой и типом передач.
Например, для упомянутого макета шестиногого ро-
бота было выделено 11 процессов [13] и соответствую-
щий граф содержал 13 ребер, помеченных частотой и
объемом передачи информации.
IV. Выделить подграфы: а) с наименьшей взаимной
информационной связностью; б) реального масштаба
времени; в) фоновые. Отметить силовые, аналоговые
и логические каналы обмена сигналами.
V. Задать альтернативные варианты распределения
процессов обработки данных по процессорам системы
управления, что определит архитектуру системы и тип
интерфейса.
VI. Для каждого варианта сформулировать функци-
ональное назначение отдельных элементов и, описав его
внешние связи, перейти к этапам 1—6 цикла разработ-
ки БИС. После этого можно приступать к оптимизации
элементной базы для данной РТС с помощью итераций
этапов V—VI с прохождением на каждой итерации эта-
пов 1—6 цикла разработки БИС.
Математическая постановка задачи заключается в
следующем: с помощью системы моделирования и ре-
шения многокритериальной задачи [12] оптимизировать
функционалы, описывающие технологические и эксплуа-
тационные критерии качества БИС и РТС, варьируя па-
раметры РТС и параметры этапов 1—6 конструирования
БИС.
' Сложность этой задачи — в распределении области
варьирования оптимизирующих параметров по всем
уровням и подсистемам управления РТС в процессе
прохождения этапов I—VI конструирования системы
управления в целом и каждой БИС. Преодолеть эту
сложность можно, соединив в единую интерактивную
систему средства моделирования и проектирования РТС
со средствами проектирования БИС. И те, и другие в
настоящее время развиты достаточно хорошо [14], что
дает надежду на удачное решение поставленной задачи
оптимизации заказных БИС в рамках системного подхо-
да к конструированию РТС.
ЛИТЕРАТУРА
1. Г р и м а й л о С. И., К а р г а ш и и А. Ю., Пла-
тонов А. К., Яшкичев И. В. Исследование кине-
матики и точностных характеристик промышленного ро-
бота Универсал-15. — Препринт ИПМ АН СССР, 1982,
№ 38.- 27 с.
2. П л а т о н о в А. К., Б о р о в и н Г. К., Д р у ж-
ч е н к о В. Е., Ч и г а и о в В. А., Н и к и ф о р о в В. В.
Исследование структуры системы управления робота
для дуговой сварки. — В кн.: Исследование робототех-
нических систем. — М.: Наука, 1982, с. 51—66.
3. Платонов А. К., К а р п о в И. И. Синтез и
моделирование на ЦВМ информационной системы ша-
гающего аппарата. — Препринт ИПМ АН СССР, 1974,
№ 66.— 49 с.
4. О х о ц и м с к и й Д. Е., Платонов А. К-, Б о-
ровин Г. К. и др. Управление интегральным локо-
моционным роботом. — Тр. VI симп. ИФАК. «Управле-
ние в пространстве». — Цахкадзор, 1974, т. 11, с. 113—
127.
5. О х о ц и м с к и й Д. Е., Платонов А. К-,
С м о л ь я н о в Ю. П. и др. Исследование многоопера-
ционной сборки с помощью экспериментальной робото-
технической системы». — Препринт ИПМ АН СССР,
1982, № 76. — 38 с.
6. Дейкстра Э. Взаимодействие последователь-
пых процессов. — В кн.: Языки программирования. —
М.: Мир, 1972, с. 9—86.
7. Электронная промышленность, 1979—1983.
8. Standart Mikrosvstems Corporation Data Catalog,
1982/83.395 p.
9. Intel Systems Data Catalog, 1982/83. 500 p.
10. Datel Intersil Short Form Catalog, 1982/83. 220 p.
11. Plander I. Research Trends in Intelligent
VLSI CAD Systems. — Proc. II Intern. Conf. «Artificial
Intelligence and Information-Control Systems of Robots».
Smolenice, ChSSR, 1982, pp. 185—191.
12. Соболь И. M., Статников Р. Б. Выбор
оптимальных параметров в задаче со многими критери-
ями. — М: Наука, 1981. — 110 с.
13. Платонов А. К. Определение характеристик
методического макета шагающего робота. — В кн.: Уп-
равление робототехническими системами и их очувствле-
ние. — М.: Наука, 1983, с. 119—130.
14. В а сен ко в А. А. Развитие микропроцессоров
и микроЭВМ семейства «Электроника НЦ» на основе
комплексно-целевых программ. — Электронная про-
мышленность, 1979, № 11-12, с. 13—16.
Статья поступила 21 декабря 1983 г.
удк 681.327